![]() (13.2)
(13.2)
где р - число пар полюсов ротора или каждой фазы статора; т- число фаз или так называемых тактов управления в одном цикле.
Для двигателя рис. 13.9 р = 1, т = 2, так как одному такту соответствует возбуждение полюсов с обмоткой, а второму (при отключении обмотки) - действие полюсов с постоянными магнитами. Следователь но, шаг двигателя α = 90°.
|
|
|
|
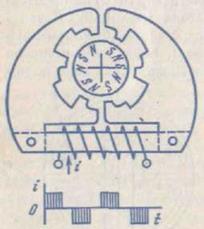
Рис. 13.10. Схема нереверсивного ШД с активным ротором, возбуждаемым знакопеременными импульсами |
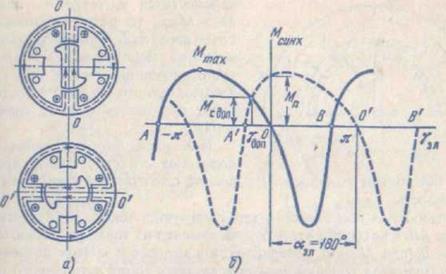
Рис. 13.11. Схема двухфазного ШД с реактивным ротором |
На рис. 13.10 изображен двигатель с активным ротором (в виде постоянного магнита), имеющим р = 5. Увеличение числа пар полюсов позволяет уменьшить шаг и сделать вращение ротора более равномерным. Шаг двигателя с активным ротором
![]() (13.3)
(13.3)
Для изображенной схемы двигателя α = 36°, причем обмотка питается разнополярными импульсами, что соответствует двум тактам за цикл (m = 2). Однонаправленность вращения обеспечивают фигурные полюсы статора, выполняющие функции клювообразных полюсов ротора двигателя (рис. 13.9).
Достоинством однофазных ШД с постоянными магнитами на статоре или роторе является простота конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке не требуется потребления энергии во время пауз, угол поворота ротора сохраняет свое значение при перерывах в питании. Двигатели этого тина могут отрабатывать импульсы, поступающие с частотой до 200—300 Гц. Их недостатки - низкий КПД и невозможность реверса.
Схема двухфазного ШД с реактивным ротором изображена на рис. 13.11,а. Фазные обмотки управления поочередно подключают к источнику напряжения постоянного тока с помощью схемы, на вход которой поступают управляющие импульсы. Как и в двигателе рис. 13.9, каждому включению обмоток соответствует поворот ротора на один шаг, равный согласно (13.2) 90°, в сторону клювообразных выступов ротора (р = 1, т = 2).
Важной характеристикой ШД является зависимость статического синхронизирующего момента от электрического угла рассогласования γэл т. е. зависимость вращающего момента при установившемся токе й обмотке от угла между осью полюса ротора и осью возбужденного полюса статора. Для двигателя с клювообразными полюсами эта зависимость имеет вид несимметричной кривой (сплошная линия на рис. 13.11,6). При отклонении ротора от согласованного (γэл = 0) положения до точки А или В вращающий момент стремится вернуть ротор в положение 0.
При подаче тока в обмотку управления другой фазы ось возбужден ною полюса смещается на один шаг, который в эл. град (радианах) для реактивного ротора
![]() (13.4)
(13.4)
Вместе с осью полюса смещается и кривая синхронизирующего момента (пунктирная кривая на рис. 13.11,б).
Точка пересечения исходной и сдвинутой характеристик определяет наибольший допустимый момент сопротивления Мсдоп, при котором возможны пуск и дальнейшая работа двигателя. Действительно, при моменте сопротивления Мс = 0 ротор в момент переключения находит ся в точке 0 и под действием пускового момента Мп придет в движение, перемещаясь к точке 0' нового устойчивого положения. Если Мсдоп> > Мс > 0, то ротор во время предыдущего шага остановится в точке, лежащей правее точки γдоп, в которой синхронизирующий момент равен моменту сопротивления. При подаче следующего импульса ротор тоже
|
|
|
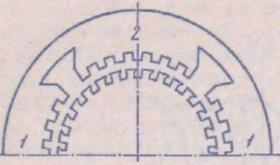
Рис. 13.12. Схема нереверсивного редукторного ШД |
переместится к точке 0'. Если же Мс > Мсдоп, то ротор остановится в точке левее γдоп, а следовательно, как видно из расположения кривых, синхронизирующий момент при подаче следующего импульса не в состоянии , будет преодолеть момент сопротивления.
Под устойчивостью работы ШД понимают его способность вращать ротор без потери импульсов. Различают статическую и динамическую устойчивость.
Статическая устойчивость характеризуется зоной устойчивого равновесия АВ, в которой ротор, будучи выведен из точки устойчивого равновесия 0 (при Мс = 0), возвращается в нее после снятия воздействия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.