![]() , если за входную величину
принят угол поворота ротора.
, если за входную величину
принят угол поворота ротора.
Основные технические данные асинхронных тахогенераторов приведены в табл. П.18, П.19.
§ 9.10. Гироскопические и моментные асинхронные двигатели
Гироскопические асинхронные двигатели. Точность работы гироскопического устройства определяется значением и постоянством кинетического момента ротора. Чем больше этот момент, тем выше точность работы прибора. Необходимый кинетический момент двигателя достигается увеличением момента инерции ротора и выбором возможно большей частоты вращения.
Гироскопические двигатели обычно работают без механической нагрузки на валу, преодолевая только потери на трение в подшипниках и ротора о воздух. Практически полезная мощность на валу этого двигателя Р2 может быть численно равна потерям на трение ротора о воздух.
Гироскопические трехфазные асинхронные двигатели, применяемые в гироскопических системах, выполняют с наружным ротором и внутренним неподвижным статором. При заданных габаритах гироскопического устройства такое исполнение двигателя позволяет увеличить диаметр ротора и получить возможно больший момент инерции последнего.
|
|
|
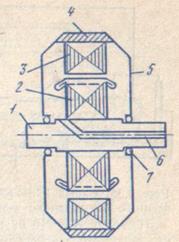
Рис. 9.35. Схема конструкции гироскопического асинхронного двигателя |
На рис. 9.35 представлена схема конструкции гироскопического асинхронного двигателя.
На неподвижном валу 1 размещают набранный из листов электротехнической стали пакет статора 2 с обмоткой, Кольцевой пакет ротора 3 также набран из листов электротехнической стали. Обмотка ротора — короткозамкнутая. Для увеличения момента инерции ротора двигателя на нем предусматривают внешний цилиндрический латунный обод 4 с полированной наружной поверхностью. На валу размешены подшипники 7 и отверстие 6 для вывода обмотки статора. С торцов конструкция закрывается крышками 5. Ротор двигателя подвергают тщательной динамической балансировке, так как рабочая частота вращения его обычно значительная.
Напряжение питания асинхронных двигателей гироскопических систем составляет 36 — 40 В при частоте 400, 500 и 1000 Гц или более. В связи с этим рабочие частоты вращения двигателей достигают 20000— 60000 об/мин и выше. Мощности на валу этих двигателей составляют от долей ватта до нескольких десятков ватт.
Вследствие повышенного момента инерции его электромеханическая постоянная времени ротора относительно велика, поэтому время разгона двигателя при пуске может достигать нескольких минут. Уменьшение времени разгона может быть достигнуто увеличением пускового момента двигателя за счет выбора надлежащих параметров обмоток статора и ротора и повышения напряжения питания двигателя на время пуска. В применяемых в настоящее время гироскопических трехфазных двигателях кратность пускового момента по отношению к номинальному при номинальном напряжении на зажимах составляет порядка 2.6 — 6.2. При повышении напряжения питания двигателя на время пуска кратность его пускового момента возрастает пропорционально квадрату кратности повышения напряжения.
Моментные асинхронные двигатели. В некоторых системах автоматического регулирования и управления в качестве измерительных или корректирующих элементов применяют малые трех- и однофазные асинхронные двигатели с короткозамкнутым ротором, работающие в режиме заторможенного ротора. Такие двигатели получили название моментныхх. В частности, моментные двигатели применяют, например. в гироскопических устройствах в качестве коррекционных двигателей. Они создают корректирующий момент для сохранения постоянства положения оси гироскопа в пространстве.
Однофазные моментные двигатели с двумя обмотками на статоре, взаимно сдвинутыми в пространстве на половину полюсного деления, используют для коррекции медленного ухода оси гироскопа под влиянием небольшого момента трения. Трехфазные моментные двигатели применяют в тех случаях, когда требуется создание большого коррекционного момента при наличии значительных моментов трения в системе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.