Кроме того, мощность двигателя можно найти по формуле
![]()
где Р-в Вт; Мс — в кГм; nс — в об/мин.
По
каталогу выбирают двигатель, номинальная мощность которого Рном >
Р. По его номинальной частоте вращения nном
определяют общее передаточное отношение редуктора![]() и,
составив кинематическую схему редуктора, оценивают его КПД. Если КПД отличается
от того, каким задались в начале расчета, то следует уточнить мощность
двигателя. Необходимость такого уточнения становится очевидной, если учесть,
что, например, КПД планетарных редукторов некоторых авиационных механизмов не
превышает нескольких процентов.
и,
составив кинематическую схему редуктора, оценивают его КПД. Если КПД отличается
от того, каким задались в начале расчета, то следует уточнить мощность
двигателя. Необходимость такого уточнения становится очевидной, если учесть,
что, например, КПД планетарных редукторов некоторых авиационных механизмов не
превышает нескольких процентов.
Если выбранный двигатель рассчитан на продолжительный режим работы, то при длительной постоянной нагрузке нет необходимости производить его проверку на нагрев и перегрузочную способность.
Переменная нагрузка. Если нагрузка не остается постоянной, как, например, на рис. 15.4, то определить мощность двигателя можно по нагрузочной диаграмме, представляющей зависимость нагрузочного момента от времени. При этом есть отличие при выборе мощности двигателей типа асинхронных и постоянного тока. Угловую скорость асинхронного двигателя при изменениях нагрузочного момента можно принять постоянной. Тогда, используя метод эквивалентного момента, требуемую мощность двигателя определяют по формуле
![]()
где Мэк находят по (15.5) и выбирают из каталога двигатель с Рном ≥ Р. Скорость же вращения двигателя постоянного тока (особенно с последовательным возбуждением) резко меняется с изменением нагрузочного момента. Поэтому требуемая мощность двигателя
![]()
где

— среднеквадратичная угловая скорость двигателя.
Значения ω1 ω2, ..., ωnопределяют но механической характеристике двигателя.
Выбрав
двигатель, необходимо проверить, в состоянии ли он преодолеть наибольший момент
сопротивления, учитывая, что максимальный вращающий момент двигателя связан с
его номинальным моментом коэффициентом перегрузки по моменту ![]() Для асинхронных двигателей
Для асинхронных двигателей ![]() для синхронных
для синхронных![]() и для
двигателей постоянного тока λM =
2 ÷ 5.
и для
двигателей постоянного тока λM =
2 ÷ 5.
§ 15.6. Выбор двигателя при кратковременном и повторно-кратковременном режимах работы
Кратковременный режим. С одной стороны, как указывалось в § 15.2, двигатель продолжительного режима работы, используемый в кратковременном режиме, может быть перегружен. Если в течение времени tвкл (см. рис. 15.5) двигатель должен развить вращающий момент М, то эквивалентный момент двигателя продолжительного режима Мэк = M/pт, где рт-коэффициент термической перегрузки, определяемый по (15.9).
С другой стороны, эквивалентный момент Мэк, по которому может быть выбран двигатель, следует оценить по перегрузочной способности двигателя: Мэк = М/λM.
Из этих двух значений Мэк принимают большее и по нему выбирают двигатель, удовлетворяющий условию Мном≥Мэк Если двигатель асинхронный, то необходимо проверить его по пусковому моменту, т. е. выполняется ли условие Мп > М.
Повторно-кратковременный
режим. Двигатель,
работающий в этом режиме, выбирают по вращающему моменту М, который он должен
развивать за время tвкл(см.
рис. 15.6), и по продолжительности включения ПВ согласно (15.10). Эти
величины позволяют выбрать двигатель по каталогу. Если вычисленное фактическое
значение ПВф отличается от стандартного ПВст(см. § 15.2), то![]() и двигатель выбирают из условия Мном≥Мэк.
и двигатель выбирают из условия Мном≥Мэк.
Если
двигатель выбирают по каталогу двигателей, рассчитанных на продолжительный
режим работы, то эквивалентный момент находят с помощью коэффициента
термической перегрузки (15.7):![]()
Как и в предыдущем случае, двигатель проверяют на перегрузку по моменту и пусковой момент.
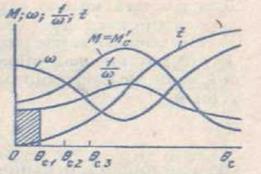
§ 15.7. Выбор двигателя при нагрузочном моменте, зависящем от утла поворота вала исполнительного механизма
|
|
|
Рис. 15.9. К построению характеристик привода упрощенным методом |
Изложенный в этом параграфе расчет производят для систем автоматики, в которых исполнительный механизм должен перемещаться из одного крайнего положения в другое.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.