|
|
|
|
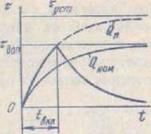
Рис. 15.5. График изменения температуры при кратковременном режиме работы двигателя |
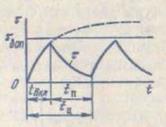
Рис. 15.6. График изменения температуры при повторно-кратковременном режиме работы двигателя |
Если в кратковременном режиме работает двигатель, рассчитанный на продолжительный режим работы, то он может развивать (преодолевать) нагрузочный момент, больший номинального, и отдавать мощность, большую номинальной, но при включении на короткое время. Длительность включенного состояния tвкл определяют с помощью коэффициента термической перегрузки, показывающего, во сколько раз можно допустить превышение потерь на нагрев в двигателе при кратковременном режиме Qппо отношению к номинальным потерям Qномпри продолжительном режиме:
![]()
Так как
![]()
то, подставив (15.7) в(15.8) и сократив полученное выражениена τуст, получим
![]()
откуда![]()
Повторно-кратковременным называют такой режим, при котором за время включенного состояния tвкл температура двигателя не достигает установившегося значения, а за время паузы tп не успевает понизиться до температуры окружающей среды. Кривая изменения температуры т может быть построена методом шаблонов с учетом, что постоянные времени нагрева и охлаждения, а следовательно, и шаблоны для этих процессов, как указывалось в § 15.1, могут существенно отличаться (рис. 15.6).
Этот режим характеризуется относительной продолжительностью включения, выражаемой обычно в процентах:
![]()
где tц - время цикла.
Для промышленных двигателей указываются номинальные данные для четырех значений ПВ: 15, 25, 40 и 60%. Продолжительность цикла, если нет других указаний, принимается равной 10 мин. Для бортовых, в частности, авиационных двигателей, ПВ =10% (иногда ПВ ≈ 1,5%).
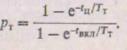
Если принять постоянные времени нагрева и охлаждения равными Ттто коэффициент термической перегрузки
§ 15.3. Виды нагрузочных моментов
Момент сопротивления Мс, который должен преодолевать двигатель, складывается из нагрузочного момента, приведенного к валу двигателя, и момента трения самого двигателя. Часто последним пренебрегают и принимают за момент сопротивления только нагрузочный момент. Нагрузочный момент, как правило, является случайной величиной. Точное его определение возможно лишь при статистической обработке результатов ряда измерений в реальных условиях работы привода. Тем не менее, все многообразие нагрузок можно систематизировать по характеру изменения момента в зависимости от угловой скорости или угла поворота механизма и представить в виде типовых закономерностей
|
|
|
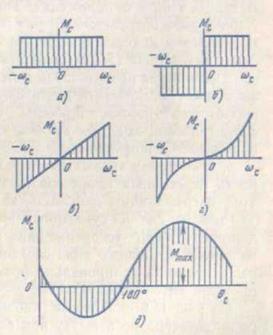
Рис. 15.7. Виды нагрузочных моментов |
1. Наиболее простым видом нагрузочного момента, удобным для аналитического решения задачи выбора двигателя, является постоянный момент, не зависящий от параметров движения ни по значению, ни по знаку (рис. 15.7, а): Мс = const. Классическим примером такого вида нагрузки является подъем или спуск груза. Близок к этому момент, создаваемый в системе регулирования скорости движения лентопротяжных механизмов и намоточных устройств с постоянным натягом ленты, провода и т. п.
2. Другим видом нагрузочного момента является момент сухого трения (рис. 15.7,6), неизменный по значению, но приложенный навстречу направлению вращения (скорости): Мс = Мс signωс. В следящих системах небольшой мощности и приводах этот вид нагрузки является основным.
Привод вентилей, дросселей, клапанов в системах автоматического регулирования температуры, расхода газа и жидкости, винтов кареток некоторых станков, щеток потенциометров и т. п. устройств характеризуется прежде всего моментом трения.
Зависимость Мс = f(ω)(рис. 15.7,6) справедлива лишь для однородных материалов при специальной обработке поверхностей. В общем же случае момент сухого трения не остается постоянным, а сложным образом зависит от скорости перемещения. Кроме того, в механизмах, длительно находящихся в покое или в особых средах (например, в вакууме), наблюдается эффект залипания, при котором сопротивление начальному движению возрастает в несколько раз.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.