Динамическая устойчивость определяется зоной устойчивого равновесия, в которой ротор, будучи выведен из точки 0, перейдет в точку нового устойчивого равновесия. Если при движении, качнувшись, ротор окажется левее точки А', то при подаче следующего импульса он не придет в точку 0', а повернется в сторону, противоположную желаемому направлению вращения.
Ввиду большого шага, а следовательно, неравномерного вращения, двигатель, изображенный на рис. 13.11, не нашел применения.
Равномернее вращение у редукторных ШД, шаг которых значительно меньше 90°, хотя полюсы статора имеют также двухфазную обмотку. Полюсы статора и ротор имеют зубцы с одинаковым зубцовым делением (рис. 13.12). «Клювы» зубцов ротора обеспечивают пусковой момент и однонаправленность вращения.
При подаче, например, импульса в обмотки пары полюсов статора 1 — 1 оси зубцов ротора становятся соосными с осями зубцов этой пары (рис. 13.12), а при подаче следующего импульса в обмотки пары полю сов статора 2—2 ротор повернется на половину зубцового деления ротора так, что оси зубцов ротора станут соосными с зубцами полюсов статора 2 — 2. Таким образом, шаг редукторного двигателя с реактивным ротором можно вычислить по формуле
![]() (13.5) где zp-число зубцов ротора. Например, при
(13.5) где zp-число зубцов ротора. Например, при![]()
§ 13.7. Реверсивные шаговые двигатели
Для осуществления реверса зубцы ротора и статора должны быть симметричными (без клювообразных выступов), т. е. обеспечивать симметричность характеристики синхронизирующего момента.
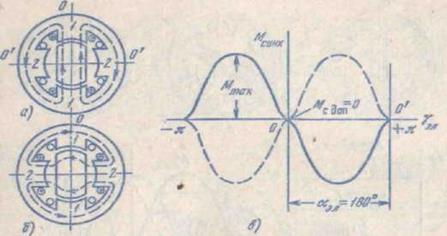
Рассмотрим процессы в двухфазном двигателе с симметричным ре активным ротором (рис. 13.13, а) при поступлении импульса в обмотки пары полюсов 2 — 2 его статора (рис. 13.13, б). Сплошной кривой на рис. 13.13,в изображена зависимость статического синхронизирующего момента вертикальной пары полюсов (фаза 1 — 1), вдоль оси которых в исходном положении расположен ротор, от угла γэл. При подаче тока в обмотку фазы 2 — 2 магнитные силовые линии этой пары полюсов за мыкаются, как показано на рис. 13.13,б. Нетрудно убедиться, что ротор окажется при этом в состоянии неустойчивого равновесия и может вращаться в ту или иную сторону.
На рис.
13.13, в пунктирной кривой изображена зависимость синхронизирующего
момента фазы 2 — 2, сдвинутая в соответствии с (13.4) на угол ![]() . Сравнивая рис. 13.13,в с рис.
13.11,б, видим, что
. Сравнивая рис. 13.13,в с рис.
13.11,б, видим, что ![]() т. е. при двухфазном
питании ШД с симметричным реактивным ротором не работоспособен.
т. е. при двухфазном
питании ШД с симметричным реактивным ротором не работоспособен.
|
|
|
|
Рис. 13.13. Схема двухфазного ШД с симметричным реактивным ротором |
|
|
|
|
|
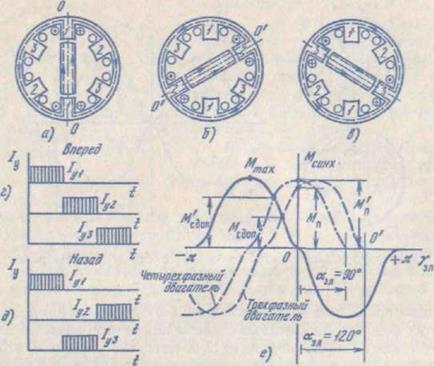
Рис. 13.14. К пояснению работы трехфазного реверсивного ШД с реактивным ротором и его сравнению с четырехфазным |
|
Рассмотрим
работу трехфазного ШД с реактивным ротором. На рис. 13.14, а — в показана последовательность
расположения ротора, когда в обмотки 1-3 подают последовательно импульсы
тока Iу1 — Iу3, изображенные на рис. 13.14,г. В
соответствии с (13.2) шаг такого двигателя![]()
В момент
подачи тока в очередную фазную обмотку кривая синхронизирующего момента в
соответствии с (13.4) сдвигается на угол ![]() ,
При изменении последовательности подачи им пульсов в обмотки (рис. 13.14,
д) ротор начинает вращаться в противоположную сторону.
,
При изменении последовательности подачи им пульсов в обмотки (рис. 13.14,
д) ротор начинает вращаться в противоположную сторону.
Хотя такой двигатель и осуществляет реверс, из характеристик синхронизирующего момента (рис. 13.14,е) виден его недостаток: допустимый момент сопротивления Мсдоп, который может преодолевать двигатель при вращении, значительно ниже его возможного пускового момента Мп.
Лучшими
характеристиками синхронизирующего момента обладает четырехфазный двигатель,
выполненный подобно трехфазному с реактивным ротором, имеющим одну пару
полюсов, для которого![]()
Зависимости синхронизрующего момента от утла γэл между осями ротора и возбужденной пары полюсов для такого двигателя показаны на рис, 13.14,е сплошной и штрихпунктирной линиями. Сравнивая шаги и кривые синхронизирующих моментов для трех- и четырехфазного двигателей, видно, что в последнем случае вращение ротора происходит равномернее, а допустимый момент сопротивления нагрузки М'сдоп и пусковой момент М'п больше.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.