где xaq, xad-индуктивные сопротивления поперечной и продольной реакции якоря.
Для построения преобразованной векторной диаграммы ЭДС ![]() (рис.
12.11) разлагают на две составляющие и, имея в виду только абсолютные значения,
получают:
(рис.
12.11) разлагают на две составляющие и, имея в виду только абсолютные значения,
получают:
Тогда


Пренебрегая активным сопротивлением обмотки статора, построим преобразованные векторные диаграммы (рис. 12.12,а,б) для активно-индуктивной и активно-емкостной нагрузок соответственно уравнению
![]()
где ![]() —
синхронные индуктивные сопротивления
—
синхронные индуктивные сопротивления
по продольной поперечной
осям. Они являются
важнейшими параметрами синхронной машины и, так же как и хs1, выражаются в долях единицы. При емкостной нагрузке ЭДС![]() направлена согласно с ЭДС
направлена согласно с ЭДС![]() , как в этом случае продольная МДС реакции
якоря намагничивает генератор, а при индуктивной нагрузке - встречно.
, как в этом случае продольная МДС реакции
якоря намагничивает генератор, а при индуктивной нагрузке - встречно.
§ 12.5. Синхронные тахогенераторы
|
|
|
Рис. 12.13. Схема конструкции четырехполюсного синхронного тахогенератора |
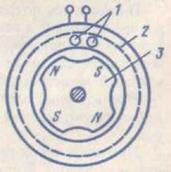
Синхронный тахогенератор является простейшим тахогенератором переменного тока. На рис. 12.13 показана конструктивная схема четырехполюсного тахогенератора.
В пазах статора 2, набранного из листовой электротехнической стали, уложена однофазная распределенная обмотка 1. Внутри статора находиться ротор 3, представляющий собой дискообразный постоянный магнит с полюсами чередующейся полярности При вращении ротора в статорной обмотке наводится ЭДС
![]()
![]()
где ![]() —
передаточный коэффициент тахогенератора, рассматриваемого как усилительное
звено с передаточной функцией
—
передаточный коэффициент тахогенератора, рассматриваемого как усилительное
звено с передаточной функцией![]()
Таким образом, при холостом ходе
тахогенератора выходное напряжение![]() и пропорционально его
частоте вращения. Однако частота тахогенератора - функция частоты вращения.
Следовательно, в нагруженном тахогенераторе реактивная (индуктивная и
емкостная) составляющая Zн и индуктивное сопротивление xslобмотки самой машины изменяются с
изменением частоты, поэтому выходная характеристика
и пропорционально его
частоте вращения. Однако частота тахогенератора - функция частоты вращения.
Следовательно, в нагруженном тахогенераторе реактивная (индуктивная и
емкостная) составляющая Zн и индуктивное сопротивление xslобмотки самой машины изменяются с
изменением частоты, поэтому выходная характеристика ![]() нелинейна.
нелинейна.
Зависимость частоты выходного напряжения от частоты вращения и нелинейность выходной характеристики снижают точность работы синхронных тахогенераторов. Поэтому, несмотря на простоту устройства и отсутствие скользящих контактов, эти тахогенераторы в автоматических системах применяют редко. Используют их в основном для измерения частоты вращения различных механизмов и машин, подключая непосредственно к вольтметру со шкалой, отградуированной в об/мин.
§ 12.6. Синхронные двигатели и их характеристики
Синхронные двигатели в основном выполняют явнополюсными. Учитывая важное свойство синхронных двигателей — при перевозбуждении работать с опережающим cosφ, их изготовляют для номинальной работы при cosφ = 1 и опережающем cosφ = 0,8.
Статор двигателя имеет ту же конструкцию, что и статор синхронного генератора. Для облегчения пуска двигателя зазор у него делается меньше зазора у генератора. В полюсные наконечники двигателей закладывают специальную пусковую обмотку. Возбудитель обычно насаживают на вал двигателя, а в двигателях большой мощности выполняют отдельно.
Как отмечалось, синхронные машины обладают свойством обратимости. Если к синхронному генератору, работающему параллельно с сетью, прекратить подвод механической энергии, то машина будет продолжать вращаться синхронно, так как статор и ротор по-прежнему упруго сцеплены между собой. Разница лишь в том, что при работе машины в качестве двигателя мощность подводят из сети к его статору, магнитный поток которого является ведущим звеном системы, а поток ротора и, следовательно, сам ротор - ее ведомым звеном.
Поэтому ось потока статора двигателя
всегда опережает ось потока ротора на угол θ, а вектор подводимого к двигателю
напряжения опережает составляющую -![]() на тот же угол в.
Установившийся режим работы двигателя имеет место при таком угле в, когда
вращающий и тормозящий моменты двигателя взаимно уравновешиваются.
на тот же угол в.
Установившийся режим работы двигателя имеет место при таком угле в, когда
вращающий и тормозящий моменты двигателя взаимно уравновешиваются.
При изучении электромагнитных процессов в синхронных двигателях пользуются теми же методами, что и при исследовании генераторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.