Часто для привода устройств автоматики требуется относительно небольшая частота вращения выходного вала. При небольшой мощности привода (единицы или десятки ватт) целесообразно применять редукторные двигатели, совмещающие функции двигателя и понижающего редуктора. Редуцирование частоты вращения осуществляют за счет зубчатого (гребенчатого) выполнения полюсов статора и ротора из магнитомягкого материала, что равносильно увеличению в несколько раз числа пар полюсов. Этот принцип редуцирования используют и в шаговых двигателях для уменьшения размера шага, т. е. угла поворота ротора под действием каждого импульса.
Другим типом двигателя с пониженной частотой вращения являются двигатели с катящимся ротором, работающие по принципу механических планетарных редукторов.
Все двигатели отличаются высокой эксплуатационной надежностью из-за отсутствия подвижных электрических контактов.
§ 13.2. Реактивные двигатели с распределенной обмоткой статора
Статоры реактивных двигателей с распределенной обмоткой конструктивно не отличаются от обычных асинхронных и синхронных двигателей. Роторы таких двигателей имеют явнополюсную конструкцию; их выполняют из магнитомягкого материала.
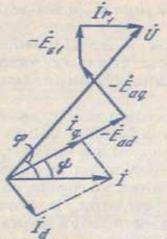
Работу реактивного синхронного двигателя можно проанализировать, основываясь на общей теории синхронных машин, если считать ЭДС, наводимую в обмотке статора роторным потоком возбуждения, равной нулю. Векторная диаграмма такого двигателя имеет вид, представленный на рис. 13.1. Напряжение источника питания уравновешивается падением напряжения на активном и индуктивных сопротивлениях:
![]()
Такие реактивные двигатели на статоре могут иметь как трехфазную, так и однофазную обмотку.
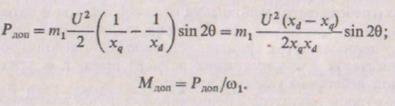
Работа двигателя основана на использовании дополнительной электромагнитной мощности и дополнительного вращающего момента (см. § 12.7):
|
|
|
|
Рис. 13.1. Векторная диаграмма реактивного синхронного двигателя |
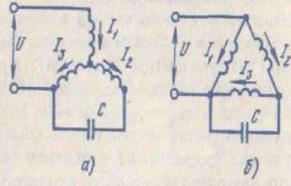
Рис. 13.2. Схемы пуска однофазных синхронных реактивных двигателей при соединении обмоток статора звездой (а) и треугольником (б) |
Дополнительный момент зависит от: 1) квадрата напряжения, под веденного к двигателю; 2) разности xd— xq;3) sin2θ. Чтобы добиться наибольшего значения Мдоппри прочих равных условиях, реактивному двигателю придают такое конструктивное оформление, при котором разность xd— xq максимальна.
Физическая картина работы реактивного двигателя основывается на том же эффекте отклонения магнитных силовых линий, идущих из ста тора в ротор, как и в обычном синхронном двигателе с возбуждением (ср. рис. 12.17).
Реактивные двигатели получили широкое распространение в качестве машин малой мощности (порядка нескольких десятков ватт). В этом случае двигатель выполняют однофазным, что упрощает его конструктивно, но затрудняет пуск в ход. Такой двигатель необходимо синхронизировать с сетью, приведя его во вращение.
Для улучшения пусковых и рабочих характеристик однофазных реактивных двигателей разработана система однофазного реактивного конденсаторного двигателя (рис. 13.2). Если выбрать емкость конденсатора так, чтобы напряжение на его зажимах было равно линейному напряжению, а ток через конденсатор - линейному току, то токи I1, I2, I3в об мотках двигателя образуют симметричную трехфазную систему.
Конденсаторный реактивный двигатель имеет по сравнению с обычным однофазным лучшие пусковые характеристики, более высокий cosφ; он менее склонен к колебаниям, но обладает несколько меньшим кпд.
§ 13.3. Редукторные реактивные двигатели
|
|
|
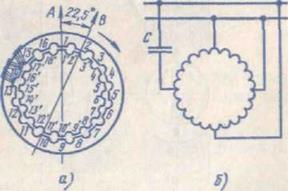
Рис. 13.3. Схема конструкции (а) и схема включения (б) редукторного реактивного двигателя |
Редукторные реактивные двигатели позволяют получить достаточно малую частоту вращения при питании от сети стандартной частоты, не прибегая к помощи редукторов. Работают они по тому же принципу, что и обычные синхронные реактивные двигатели.
Статор в виде кольца, а ротор в виде диска набраны из листов магнитомягкой электротехнической стали (рис. 13.3,а). Они снабжены полу круглыми пазами, числа которых у статора и ротора различны, но близки: например, число пазов статора zc =16, число пазов ротора zp = 18
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.