|
|
|
|
|
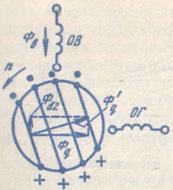
Рис. 9.30. К пояснению отклонения потока ротора от поперечной оси |
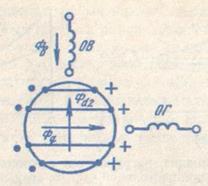
Рис. 9.31. К пояснению возникновения продольного потока ротора |
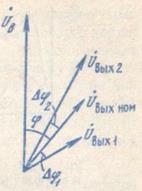
Рис. 9.32. К понятию о фазовой погрешности |
Для получения минимальной амплитудной (скоростной) погрешности стараются
работать при малых относительных частотах v, т. е. уменьшают номинальную
частоту вращения до 0,2 — 0,25 от синхронной частоты в тахогенераторах высокой точности и до 0,5 — 0,7
от синхронной частоты в тахогенераторах
следящих систем и тахогенераторах для измерения
частоты вращения. В первых из них ![]() во вторых
во вторых![]()
Выходное напряжение асинхронного тахогенератора Uвых не совпадает по фазе с напряжением возбуждения Uви не остается постоянным по фазе при изменении частоты вращения. Отклонение выходного напряжения Uвыхпо фазе от номинального Uвых ном, измеренное в угловых градусах или минутах, называют фазовой погрешностью ∆φ тахогенератора. Она отрицательна (∆φ1 при низких и положительна (∆φ2) при высоких частотах вращения (рис. 9.32). Фазовая погрешность в основном определяется индуктивными сопротивлениями ротора и обмоток статора.
Фазовая погрешность современных тахогенераторов высокой точности лежит в пределах нескольких минут, а обычных тахогенераторов достигает нескольких градусов.
На значение и фазу выходного напряжения, как следует из выражения (9.35), влияет значение и характер нагрузки (рис. 9.33).
Из рис. 9.33, а видно, что активная и чисто индуктивная нагрузка снижают, а емкостная увеличивает Uвых. Можно подобрать такое соотношение между активной и емкостной нагрузками, называемое иногда компаундированием, при котором амплитудная погрешность минимальна (значение Uвыхблизко к пунктирной прямой) в большом диапазоне изменения zн. Однако такое компаундирование увеличивает изменение фазы Uвых(рис. 9.33,б) по сравнению с чисто индуктивной нагрузкой. Как следует из рисунка, минимальное влияние на фазовую характеристику оказывает активно-индуктивная нагрузка. Таким образом, условия компаундирования нагрузки по влиянию на амплитуду и фазу противоречивы. Поэтому целесообразно производить компаундирование по тому параметру, постоянство которого для данной схемы наиболее существенно.
|
|
|
Рис. 9.33. Влияние нагрузки на выходное напряжение (а) и его фазу (б) при постоянной частоте вращения тахогенератора |
Чем больше крутизна выходной характеристики (коэффициент передачи, вычисленный для
отклонений входного и выходного параметров) ![]() или
или![]() тем больше чувствительность тахогенератора и всей
автоматической системы, в которой он работает. Крутизна выходной характеристики
зависит от магнитного потока возбуждения Фв, сопротивления ротора zp, числа витков
генераторной обмотки wr.
тем больше чувствительность тахогенератора и всей
автоматической системы, в которой он работает. Крутизна выходной характеристики
зависит от магнитного потока возбуждения Фв, сопротивления ротора zp, числа витков
генераторной обмотки wr.
Чем больше поток возбуждения Фв, тем больше ЭДС и ток ротора,
поток Фq а следовательно, и
выходное напряжение Uвых Чем меньше zp и больше wr, тем больше ток ротора и выходное
напряжение тахогенератора Uвых, а следовательно, и
крутизна его характеристики![]()
Увеличение![]() тахогенератора почти
всегда ведет к росту его амплитудной и фазовой погрешностей. Действительно, увеличение
тахогенератора почти
всегда ведет к росту его амплитудной и фазовой погрешностей. Действительно, увеличение![]() уменьшает zp (оно в основном
активное). В то же время уменьшение
уменьшает zp (оно в основном
активное). В то же время уменьшение![]() ухудшает линейность выходной характеристики и увеличивает фазовую погрешность. Так же влияет и wr Поэтому при
проектировании тахогенераторов стремятся увеличить
ухудшает линейность выходной характеристики и увеличивает фазовую погрешность. Так же влияет и wr Поэтому при
проектировании тахогенераторов стремятся увеличить![]() либо уменьшить ∆Uи ∆φ.
либо уменьшить ∆Uи ∆φ.
Крутизна выходной характеристики современных тахогенераторов определяется их назначением. У точных тахогенераторов
у тахогенераторов следящих систем
В схемах автоматики очень важно, чтобы значение выходного напряжения тахогенератора не зависело от направления вращения ротора. При изменении направления вращения ротора должна меняться на обратную (на 180°) только фаза выходного напряжения. Практически у всех тахогенераторов выходная характеристика несимметрична — напряжение Uвыхпри вращении ротора в противоположных направлениях имеет различное значение, особенно в начальной части выходной характеристики (при малых п).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.