При построении векторной диаграммы
двигателя учитывают, что по второму закону Кирхгофа приложенное к двигателю
напряжение ![]() в любой момент времени уравновешивается
совокупностью противо ЭДС двигателя
в любой момент времени уравновешивается
совокупностью противо ЭДС двигателя![]() :
:
![]() (12.2)
(12.2)
|
|
|
|
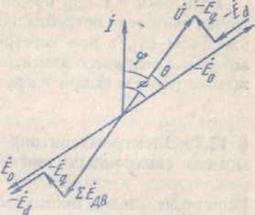
Рис. 12.14. Векторная диаграмма перевозбужденного синхронного двигателя |
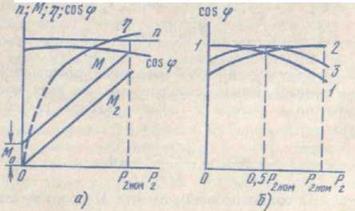
Рис. 12.15. Рабочие характеристики синхронного двигателя |
Причем, параметры![]() cosφ(φ > 0), xq xdпредполагают заданными. Векторная
диаграмма синхронного двигателя
приведена на рис. 12.14. Под углом φ к вектору тока
cosφ(φ > 0), xq xdпредполагают заданными. Векторная
диаграмма синхронного двигателя
приведена на рис. 12.14. Под углом φ к вектору тока ![]() откладывают
вектор напряжения
откладывают
вектор напряжения![]() . который
уравновешивается
. который
уравновешивается![]()
Складывая векторы ![]() и
и![]() с
вектором
с
вектором ![]() , получим вектор ЭДС -
, получим вектор ЭДС - ![]() . Следует
отметить, что при индуктивном характере нагрузки ( φ > 0) и cosφ = const реакция якоря размагничивает генератор и намагничивает двигатель.
Это объясняется тем, что ток
. Следует
отметить, что при индуктивном характере нагрузки ( φ > 0) и cosφ = const реакция якоря размагничивает генератор и намагничивает двигатель.
Это объясняется тем, что ток![]() , а стало быть, и
создаваемая им ЭДС реакции якоря ориентированы противоположно относительно
ЭДС создаваемой в генераторе и двигателе
основным потоком
, а стало быть, и
создаваемая им ЭДС реакции якоря ориентированы противоположно относительно
ЭДС создаваемой в генераторе и двигателе
основным потоком![]()
![]() I О работе синхронного двигателя судят по рабочим характеристикам:
п, М, η,
I О работе синхронного двигателя судят по рабочим характеристикам:
п, М, η, ![]() при U= const, f= const, Ib = const (рис. 12.15, а, б). Частота вращения
при U= const, f= const, Ib = const (рис. 12.15, а, б). Частота вращения ![]() при всех режимах. Вращающий момент
при всех режимах. Вращающий момент ![]() Момент холостого хода Мо = const. а полезный момент
Момент холостого хода Мо = const. а полезный момент![]() изменяется
пропорционально полезной мощности, и зависимость
изменяется
пропорционально полезной мощности, и зависимость ![]() изображают
прямой линией
изображают
прямой линией
Зависимость![]() имеет обычный для всех электрических машин
характер. КПД почти постоянен в пределах изменения нагрузки от 0.5 P2ном до Pв2ном
имеет обычный для всех электрических машин
характер. КПД почти постоянен в пределах изменения нагрузки от 0.5 P2ном до Pв2ном
Характер изменения![]() (рис. 12.15,б) зависит от того,
какое установлено возбуждение двигателя. Если подрегулировать ток возбуждения
так, что при холостом ходе cosφ = 1 (кривая
1), то при на грузке для получения cosφ = 1
необходимо повысить ток возбуждения. Но так как по условию IВ = const, то при нагрузке получится режим
недовозбуждения, при котором появятся реактивные токи, отстающие от
(рис. 12.15,б) зависит от того,
какое установлено возбуждение двигателя. Если подрегулировать ток возбуждения
так, что при холостом ходе cosφ = 1 (кривая
1), то при на грузке для получения cosφ = 1
необходимо повысить ток возбуждения. Но так как по условию IВ = const, то при нагрузке получится режим
недовозбуждения, при котором появятся реактивные токи, отстающие от ![]()
Если cosφ = 1 при номинальной нагрузке (кривая 2), то при недогрузке двигатель потребляет из сети реактивные (емкостные) опережающие [cos(-φ)], а при перегрузке - отстающие (индуктивные) токи. Для возможно меньшего изменения cosφ устанавливают нормальное возбуждение (cosφ = 1) при нагрузке, равной 0.5P2ном (кривая 3).
§ 12.7. Электромагнитная мощность и вращающий момент синхронных двигателей
Если пренебречь активным
сопротивлением обмотки статора, то потребляемая двигателем из сети активная
мощность ![]() приближенно равна электромагнитной мощности
Pэм:
приближенно равна электромагнитной мощности
Pэм:
![]() (12.3)
(12.3)
Из векторной диаграммы (см. рис. 12.14)
при![]() определяем
определяем
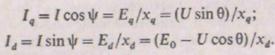 (12.4)
(12.4)
Подставив (12.4) в (12.3), получим
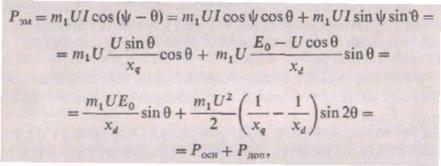
где Pосн ,Pдоп - основная и дополнительная электромагнитные мощности. Электромагнитный момент синхронного двигателя
 (12.5)
(12.5)
где Мосн, Мдоп-основной и дополнительный вращающие моменты. Электромагнитный момент складывается из двух составляющих. Взаимодействие поля ротора с полем статора создает основную составляющую
 (12.6)
(12.6)
Дополнительная составляющая момента Мдоп возникает при хq ≠ хd вследствие искривления поля реакции якоря. Эту составляющую называют реактивным моментом. Реактивный (дополнительный) момент
 (12.7)
(12.7)
§ 12.8. Асинхронный пуск синхронных двигателей
Как указывалось, синхронные двигатели выполняют явнополюсными, и полюсные башмаки которых закладывают специальную пусковую обмотку.
При асинхронном пуске напряжение, подводимое к синхронному двигателю, понижают с помощью реакторов (индуктивных сопротивлении) или автотрансформаторов до (l/2-l/3Uном, реже производят прямое включение на полное напряжение сети (рис. 12.16). Данный способ пуска сводится к следующему. Под действием подведенного напряжения в статоре возникает магнитное поле, вращающееся с синхронной частотой. Во избежание перенапряжений обмотка ротора должна быть замкнута на пусковой реостат Rпсопротивление которого превышает активное сопротивление обмотки в 10-15 раз. Последовательность пуска следующая: сначала замыкают переключатель П1и выключатель В1, затем переключатель ставят в положение П2 и замыкают В2, отключая В1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.