(14.1)
(14.1)
а для приемника определяются как
 (14.2)
(14.2)
Так как одинаковые обмотки СД и СП включены встречно (рис. 14.4), то между одноименными концами обмоток действуют разностные ЭДС
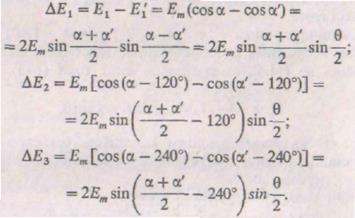
Обозначив через Z сопротивление каждой фазной обмотки сельсина и пренебрегая сопротивлением проводов связи, найдем токи в проводах линии связи и роторах датчика и приемника, учтя, что α' = α - θ, Im = = Em/Z
![]() (14.3)
(14.3)
![]() . (14.4)
. (14.4)
![]() (14.5)
(14.5)
Алгебраическая сумма токов

так как
![]()
при любом угле рассогласования.
|
|
|
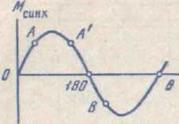
Рис. 14.5. Зависимость статического синхронизирующего момента от угла рассогласования |
Протекая по трем роторным обмоткам сельсина, сдвинутым в пространстве на 120° друг относительно друга, токи создают три МДС, также пространственно сдвинутые на 120° согласно (7.9):
![]()
Складывая геометрически эти МДС, получают результирующую МДС, пространственное направление которой зависит от положения ротора. Результирующую МДС разлагают на две пространственные составляющие: продольную Fdнаправленную по оси обмотки возбуждения, и поперечную Fq, направленную перпендикулярно ей. Синхронизирующий момент сельсина создается только в результате взаимодействия поперечной составляющей МДС Fq с потоком обмотки возбуждения; продольная составляющая МДС Fdв создании этого момента не участвует.
Для
сельсина-приемника Fq = F1 sin α' + F2sin (α' - 120°) + F3sin (α' -— 240°). После несложных преобразований, подставляя вместо F1F2и F3 их значения из (14.6), выраженные через токи (14.3), (14.4),
(14.5), получим ![]()
Статическим синхронизирующим моментом сельсина Mсинх называют вращающий момент, действующий на валу неподвижного ротора при угле рассогласования θ,
Статический синхронизирующий момент СП
 (14.7)
(14.7)
где Мт = k'kФ cosφ; φ - угол между токами и ЭДС в обмотках.
Зависимость момента Mсинх от угла рассогласования θ носит синусоидальный характер (рис. 14.5). Причем при повороте ротора до 180° (точки А и А') сельсин находится в устойчивом равновесии, так как Mсинх стремится вернуть ротор в начальное положение 0. При отклонении ротора на угол больше 180° (например, точка В) сельсин находится в неустойчивом равновесии, так как Mсинх стремится увеличить угол рассогласования, пока ротор не придет в новое положение равновесия, отличающееся от начального на 360°.
Помимо статического (ω = 0) сельсины также могут работать в динамическом режиме как при равномерном (ω = const), так и неравномерном (ω = var) вращении. Поэтому представляет интерес динамический момент
 (14.8)
(14.8)
С увеличением частоты f питающей сети Mдин возрастает. Как правило, сельсины питаются от сети частотой 50, 400 или 500 Гц.
Точность работы сельсинов в индикаторных передачах зависит от технологических причин (одинаковая проводимость роторов по любой оси, отсутствие эксцентриситетов, симметрия обмотки и др.) и режима работы сельсинов.
По точности работы сельсины делят на три класса:
|
Класс точности |
1 |
2 |
3 |
|
Погрешность изготовления, град |
|||
|
СД |
0÷±0,25 |
±0,25÷±0,5 |
+0,5÷±1,0 |
|
СП |
0÷±0,75 |
+0,75÷±1,5 |
±1,5 ÷±2,5 |
Дифференциальное уравнение движения вала сельсина имеет вид
![]()
![]()
но ![]() Поэтому
Поэтому![]() Тогда
Тогда ![]() ±0,25÷±0,5
СД откуда угол рассогласования
±0,25÷±0,5
СД откуда угол рассогласования
 (14.9)
(14.9)
Установившееся значение угла рассогласования θопределяет ошибку, которая зависит от режима работы.
Статический режим (ω = 0). Ротор датчика повернули на некоторый угол и остановили. Ротор приемника должен отработать тот же угол
![]() (14.10)
(14.10)
Режим равномерного вращения (ω = const). Оба ротора вращаются равномерно и угол рассогласования
![]() (14.11)
(14.11)
Режим неравномерного вращения (ω = var). Угол рассогласования в этом режиме на основании (14.9) складывается из двух составляющих и является наибольшим:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.