Эффективное использование машинной техники зависит не только от умелого выбора машин и комплектования МТА с оптимизацией режима их работы, но и от того, насколько правильно организовано выполнение каждой операции, включая подготовку рабочих участков для работы, а также от обоснования ресурсосберегающего способа движения агрегатов и др.
Машинно-тракторные агрегаты в процессе работы перемещаются по рабочему участку (полю, вырубке и другим категориям площадей), проходя за смену расстояния в десятки километров. При этом пройденный МТА путь состоит из рабочих и холостых (на поворотах) ходов с выключенными рабочими органами. Необходимо стремиться к тому, чтобы холостой путь МТА и другие потери времени смены были как можно меньше. Это позволит сэкономить топливо и повысить производительность.
Способ движения МТА — это закономерная последовательность его перемещения по полю в процессе работы с циклично повторяющимися элементами: формой траектории с рабочими и холостыми ходами, видами и радиусами поворотов и др.
Кинематика МТА изучает способы движения мобильных агрегатов с рабочими и холостыми ходами при выполнении технологических операций на участках работ.
Кинематика (от гр. kinematos — движение) — раздел механики, изучающий геометрические свойства движения тел, условно принимаемых за точку, без учета их массы.
При обосновании способов движения МТА, а также элементов подготовки участков к работе (ширины поворотных полос, загонов и др.) учитываются следующие показатели кинематической характеристики МТА: кинематический центр, кинематическая длина, длина выезда агрегата, радиус и центр поворота, ширина агрегата и др.
Значения этих показателей зависят от конструктивных особенностей трактора, рабочих машин, сцепки, состава и особенностей комплектования агрегата.
Кинематическим центром агрегата называется условная геометрическая точка Ц (рис. 15.1), траектория которой на плоскости движения (поверхности участка) имитирует траекторию движения МТА на поворотах и при выполнении рабочих ходов. Точка Ц для МТА с колесными тракторами с жесткой рамой определяется как проекция средины задней ведущей оси на плоскость движения. Для МТА с тракторами, имеющими шарнирно-сочлененную раму, за кинематический центр принимается проекция на плоскость движения центра шарнира рамы. У МТА с гусеничными тракторами проекция точки Ц на плоскость движения соответствует точке пересечения диагоналей, проведенных через наружные края гусениц.
Кинематической длиной агрегата /к называется проекция расстояния от кинематического центра агрегата Ц до точки пересечения линии, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА окончания ра-
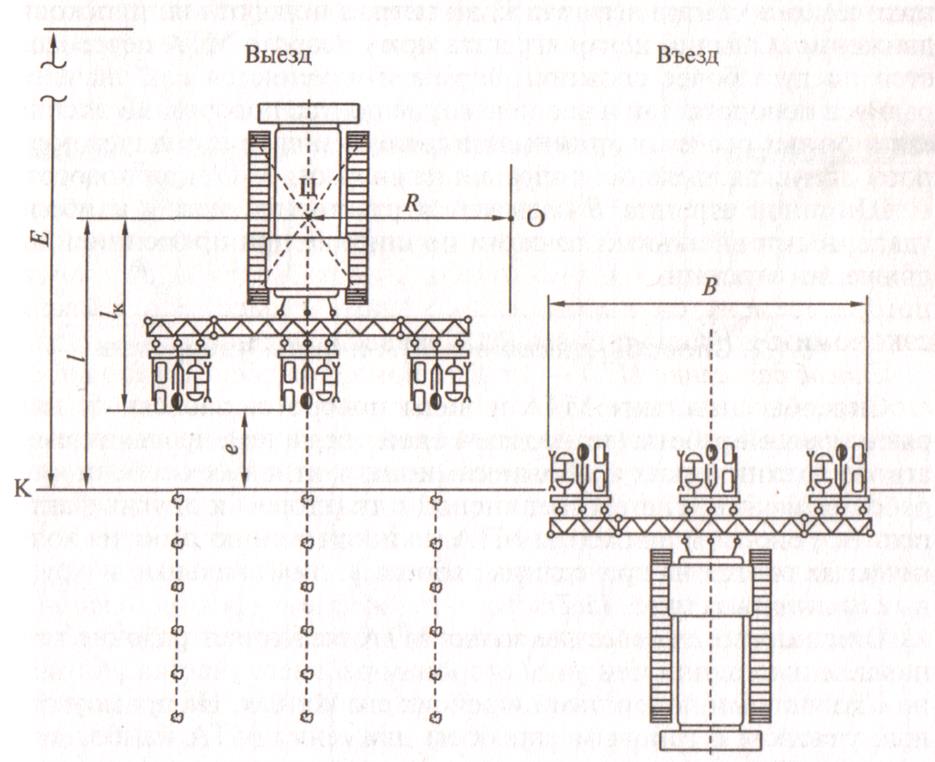
Рис. 15.1. Основные элементы кинематической характеристики мобильного агрегата рабочего участка:
Ц — кинематический центр агрегата; О — центр поворота; R — радиус поворота; /к — кинематическая длина агрегата; е — дополнительный путь для вывода рабочих органов при выезде в режим холостого хода и для их ввода при въезде в режим рабочего хода; / — длина выезда агрегата; В — ширина агрегата; К — контрольная линия; Е — ширина поворотной полосы
бочих органов машин при прямолинейном движении. Кинематическая длина агрегата состоит из кинематических длин трактора, сцепки и рабочих машин.
Длиной выезда агрегата I называется расстояние, на которое перемещается центр агрегата Ц от контрольной линии (границы обрабатываемого участка) перед началом и в конце поворота по ходу МТА. Длина выезда агрегата, как правило, превышает кинематическую длину агрегата, так как необходимо дополнительное расстояние (путь) для вывода или ввода рабочих органов машины в режим холостого или рабочего хода:
l > lк или l = е + lк,
где е — дополнительный путь для вывода рабочих органов при выезде в режим холостого хода и для их ввода при въезде в режим рабочего хода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.