7) Параметры мех движения:
1) Вращательное
–Моменты[Н/м] М; угол поворота[рад]![]() ; угловая скорость
; угловая скорость ![]() [рад/c]; угловое ускорение
[рад/c]; угловое ускорение![]() [рад/
[рад/![]() ]; рывок
]; рывок![]() [рад/
[рад/![]() ]; 2) Поступательное: Сила F [Н];
Путь(перемещение) x [м]; лин скорость
]; 2) Поступательное: Сила F [Н];
Путь(перемещение) x [м]; лин скорость![]() [м/с]; ускорение
[м/с]; ускорение ![]() [м/
[м/![]() ]; рывок
]; рывок ![]() . Элементы ЭП облодающие способностью накапливать
энергию различаются по виду накопленной энергии: 1) накап-ие кинет. Энергию
характеризуются: вращательным движениям моментом инерции J [кг*
. Элементы ЭП облодающие способностью накапливать
энергию различаются по виду накопленной энергии: 1) накап-ие кинет. Энергию
характеризуются: вращательным движениям моментом инерции J [кг*![]() ]; при поступательном –массой [кг]. 2) Механические
элементы которые вращаются накапливают потенциальную энергию-упругие элементы,
диформация которых подчиняется закону Гука, эти элементы характерезуются коэффициентом
жесткости . При вращательном движении (кручении)
]; при поступательном –массой [кг]. 2) Механические
элементы которые вращаются накапливают потенциальную энергию-упругие элементы,
диформация которых подчиняется закону Гука, эти элементы характерезуются коэффициентом
жесткости . При вращательном движении (кручении) ![]() , [Н*м/рад] где
, [Н*м/рад] где![]() деформация. При
поступательном движении
деформация. При
поступательном движении ![]() [Н*м]. Податливость обратная величина
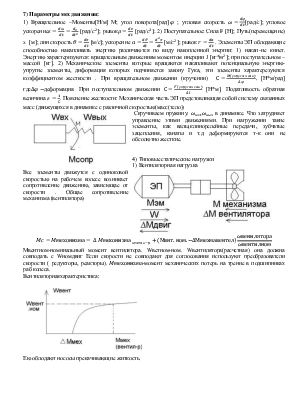
[Н*м]. Податливость обратная величина ![]() . Пояснение жесткости: Механическая часть ЭП
предстовляющая собой систему связанных масс (движущихся в динамике с различной
скоростью(масс(тело))
. Пояснение жесткости: Механическая часть ЭП
предстовляющая собой систему связанных масс (движущихся в динамике с различной
скоростью(масс(тело))
 Скручиваем
пружину.
Скручиваем
пружину. ![]() в динамике. Что затрудняет управление этими
движениями. При нагружении такие элементы, как валы,клинорелейные передачи,
зубчатые зацепления, канаты и т.д деформируются т-к они не обсолютно жесткие.
в динамике. Что затрудняет управление этими
движениями. При нагружении такие элементы, как валы,клинорелейные передачи,
зубчатые зацепления, канаты и т.д деформируются т-к они не обсолютно жесткие.
4) Типовые статические нагрузки
 1)
Вентиляторная нагрузка
1)
Вентиляторная нагрузка
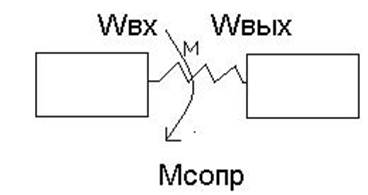
Все элементы движутся с одиноковой скоростью на рабочем колесе возникает сопротивление движению, зависющае от скорости . Общае сопротивление механизма (вентилятора)

Мвентном-номинальный
момент вентилятора. Wветном-ном. Wвентилятора(расчетная)
она должна совподать с Wномдвиг Если скорости не совподают для
соглосования используют преобразователи скорости ( редукторы, реакторы). ![]() -момент
механических потерь на трение в подшипниках раб колеса.
-момент
механических потерь на трение в подшипниках раб колеса.
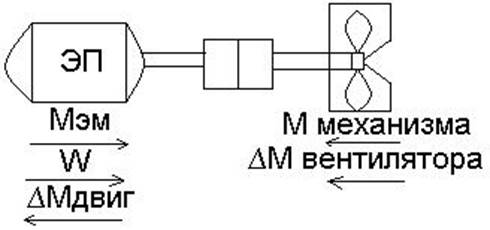
Вентиляторнаяхарактеристика:
Ею облодают нососы прекачивающие житкость.
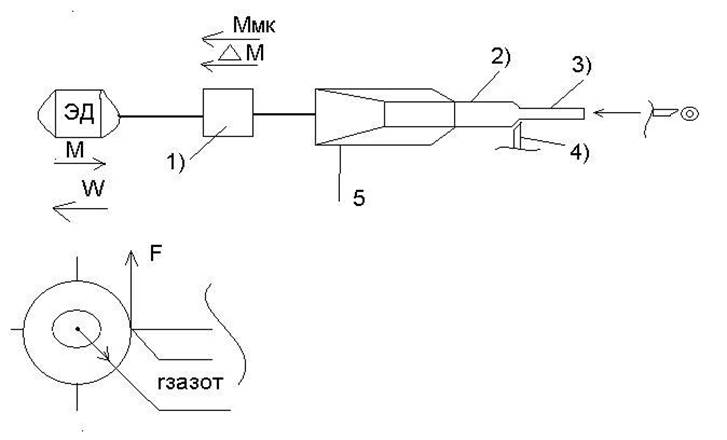
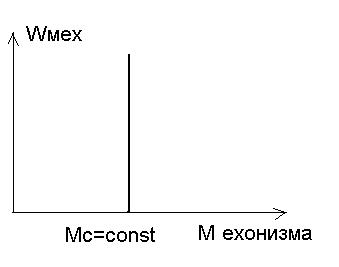
2) Мехонизмы с постоянной нагрузкой. Пример: ЭП шпинделя токорного станка
 1-коробка
предач. 2-заготовка. 3-изделия. 4-резец. 5-шпендель.
1-коробка
предач. 2-заготовка. 3-изделия. 4-резец. 5-шпендель.
Взаимодействия
резца и зоготовки создает усилия резания. ![]() В процессе оброботки заготовки сила F остается
постоянной (и Ммехонизма=const) и не зависит от скорости- справедливо
для одного слоя снятие стружки т.к потом радиус меняется. М=f(rзогот). На
систему действует момент эл-маг сил с одной стороны и полезный момент нагрузки
и момент потерь- с другой стороны.
В процессе оброботки заготовки сила F остается
постоянной (и Ммехонизма=const) и не зависит от скорости- справедливо
для одного слоя снятие стружки т.к потом радиус меняется. М=f(rзогот). На
систему действует момент эл-маг сил с одной стороны и полезный момент нагрузки
и момент потерь- с другой стороны.
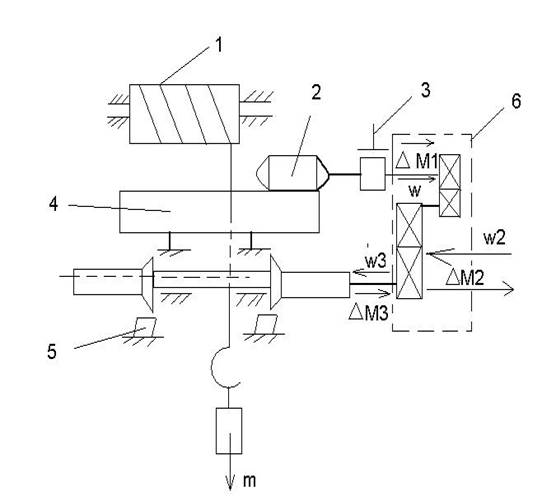
3) Мех. Хар-ка симметричная относительно нач. координат. На пр. премещения тележки мостового крана
 1-барабан.
2-Электродвигатель. 3- электроториоз. 4-тележка. 5-рельса. 6-двухступенчатый
редуктор. Тележка перемещается по горизонтальному пути. Электродвигатель через
редуктор вращает пару ведущих колес тележки преодолевая Fсопротивления
движения тележки Fмехонизма, которая возникает из за трения-скольжения
в цапфе и трения кочения колес тележки по рельсам. Т.к силы и моменты
пропорциональны нормальному давлению
1-барабан.
2-Электродвигатель. 3- электроториоз. 4-тележка. 5-рельса. 6-двухступенчатый
редуктор. Тележка перемещается по горизонтальному пути. Электродвигатель через
редуктор вращает пару ведущих колес тележки преодолевая Fсопротивления
движения тележки Fмехонизма, которая возникает из за трения-скольжения
в цапфе и трения кочения колес тележки по рельсам. Т.к силы и моменты
пропорциональны нормальному давлению ![]()
![]() -коэфициент качения.
-коэфициент качения. ![]() -коэфициент скольжения. N-количества
точек трения. Mтр-коч- момент
трения качения. Fтр.ск-сила трения скольжения. G-сила тяжести
тележки. Rц,rц-радиус колеса
и цапф оси колес. Кз-Коэфициент запаса учитывает различного рода дополнительные
усилия.(трения о борт колес и тд)
-коэфициент скольжения. N-количества
точек трения. Mтр-коч- момент
трения качения. Fтр.ск-сила трения скольжения. G-сила тяжести
тележки. Rц,rц-радиус колеса
и цапф оси колес. Кз-Коэфициент запаса учитывает различного рода дополнительные
усилия.(трения о борт колес и тд)
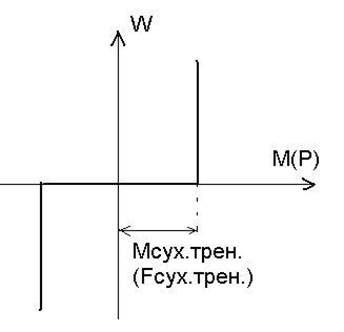
Механическая характеристика
Характеристика несколько упрощенная т.к Fсух.тр. несколько больше чем сила трения при движении, что требуется учитывать при выборе мощности движка. Иногда Fсух.тр≥Fтр.движ что надо учитывать при проекте ЭП. Очевидно привод должен быть реверсивным, поэтому характеристика симметрична относительно начала координат.
5) Мех. Характеристика расположена в правой части системы координат( 1 и 4 квандрант) причем М= const Типичными представителями-мехонизмы подьема/спуска
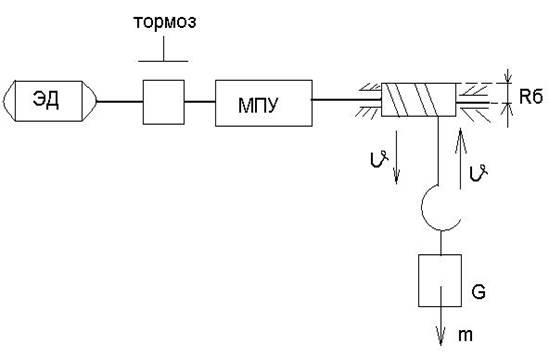
Двигатель вращает барабан, который перемещает груз, нагрузкой является G груза и крюк. Особенностью этой нагрузки является то, что она направлена всегда в сторону спуска груза и не зависит от скорости его перемещения.
1) 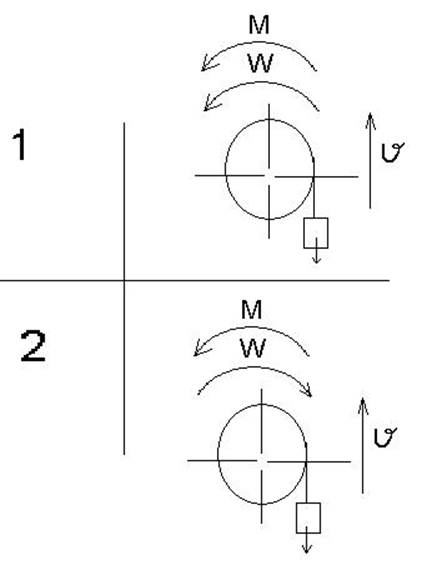 двигатель
является источником механической мощности.
двигатель
является источником механической мощности.![]()
![]()
2) ![]() двигатель является потребителем механической
энергии, и этот режим используется для торможенияю
двигатель является потребителем механической
энергии, и этот режим используется для торможенияю
![]()
Mc-может меняться
от 0 до Мс,ном т.е до номинальной грузопподьемности. G=Gном. Мощность
двигателя ![]() должна быть рассчитана на подъем номинального
груза.
должна быть рассчитана на подъем номинального
груза.
1) Требования к ЭП со стороны технологический процесс (ТП) непрерывно увеличиваются , что оказывает стимулирующее действия на его развития. Аналогично, возросшие возможности ЭП-ов позволяют совершенствовать ТП. ЭП главный потребитель электрической энергии ≈60% всей производимой эл. энергии В условиях дефицита энергетических ресурсов особо остра стоит проблема энергосбережения. Сэкономить 1 тону условного топлива вдвое дешевле чем его добыть. По управляемости ЭП разделяются: -нерегулируемые; регулируемые(РЭП)-где скорость измеряется в соответствии с требованиями ТП. ≈75% всех ЭП являются нерегулир-ми. Доля РЭП непрерывно растет.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.