В момент начала этого режима происходит
реверсирование напряжения питания с помощью переключателя, знак момента,
создаваемого двигателем, меняется, и происходит торможение. Для того чтобы
двигатель остановился, нужна следящая система, которая в момент ![]() =0 отключит питание. Уравнение движения для
этого случая имеет вид:
=0 отключит питание. Уравнение движения для
этого случая имеет вид:
|
|
Начальные условия: t=0; W=W*; Мс=0.
|
Тогда: |
|
|
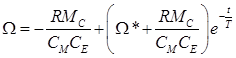
Решение уравнения (3.73):
|
где
|
|
В начальный момент времени:
|
|
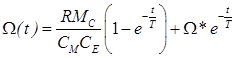
Подставим выражения (3.76) в решение (3.74):
|
|
Для режима торможения электродвигателя противовключением статических характеристик двигателя не существует.
Определим время торможения:
|
|
|
|
|
|
|
|
|
|
|
При СМ=СЕ=0,1; R=0,5 Ом; J=1×10-4 кг×м2 получаем:
|
|
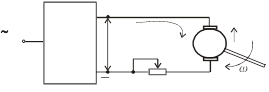
Торможение противовключением является эффективным, но оно требует применения сложной следящей системы. Поэтому часто стараются применять режим механического торможения – естественного, когда двигатель останавливается за счет естественного момента МС, или же момента МС, искусственно созданного, когда с помощью тормоза к ротору прикладывается большой момент сил трения.
меньшению тормозного момента (см. формулу (2.15)).
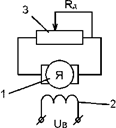 1 – якорь; 2 – обмотка возбуждения; 3 – резистор.
1 – якорь; 2 – обмотка возбуждения; 3 – резистор.
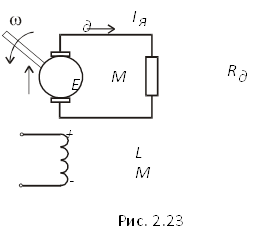
Рассмотрим режим торможения якоря ЭП ПТ по укороченному уравнению (3.59) (U=0):
|
|
|
|
|
|
|
Уравнение
(3.62) применяют в том случае, если можно пренебречь моментом сопротивления MС. Уравнения (3.61) и
(3.62) отличаются между собой очень сильно, т.к. уравнение (3.61)
аналитически решить не удается (это связано с тем, что MС – сложная функция
скорости, а иногда и угла). Пусть МС=const, тогда задача имеет аналитическое решение. Выберем начальные условия:
t0=0, W(0)=W*. Решение уравнения (3.61) имеет вид: |
(3.63) |
|
Для
определения постоянной интегрирования С используем начальные условия: |
|
|
|
|
|
|
|
|
|
|
|
Время
торможения tТ якоря
двигателя определяется из условия: |
|
|
При этом надо иметь в виду, что
электромеханическая постоянная времени: |
|
|
|
|
|
|
35 Динамическое торможение.
 |
Машина в этом случае
работает в режиме генератора. Механическая энергия, поступающая со стороны
вала, преобразуется в электрическую и выделяется в виде тепла в сопротивлениях
цепи якоря. Следовательно, режим не экономичен. Уравнение механической
характеристики несложно получить из (2.16), приняв ![]() :
:
![]() .
.
Откуда для тормозного момента двигателя получим
 .
.
Из этого соотношения
следует: во-первых, момент становится тормозящим (отрицательным); во–вторых,
момент возрастает с увеличением скорости ![]() ; в
третьих, тормозной момент при отрицательном значении
; в
третьих, тормозной момент при отрицательном значении ![]() тем
больше, чем меньше
тем
больше, чем меньше ![]() (см. характеристики 3,4 на рис.
2.22).
(см. характеристики 3,4 на рис.
2.22).
Динамическое
торможение используется, в частности, в подъемных механизмах при спуске грузов.
Например, при работе двигателя на характеристике 3 (см. рис. 2.21) и моменте ![]() , создаваемым грузом, будет происходить
спуск груза со скоростью, определяемой т. f.
, создаваемым грузом, будет происходить
спуск груза со скоростью, определяемой т. f.
Кроме того,
динамическое торможение широко используется для быстрой остановки двигателя.
Для этого с помощью схемы управления якорь двигателя отключают от сети и
замыкают на добавочное сопротивление. Эффективность торможения здесь ниже, чем
в режиме противовключения, т.к. по мере снижения ![]() уменьшается
и тормозной момент.
уменьшается
и тормозной момент.
29
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
; .
.