2 уч с обр связи по току. Iстоп –ток стопорения. Привод с отсечкой по току может работать на v;tcnrbq упор при w=0.
Реализация схемы: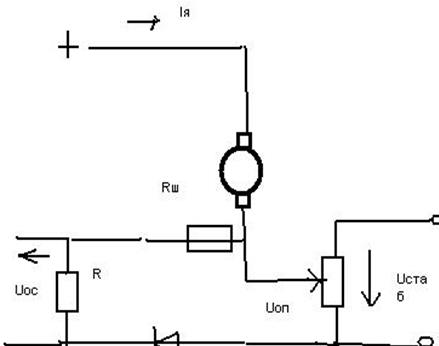
Rш-малое попротивление чтобы непомешать работе шунта
Uстаб-стабилизированное напряжение
Uоп-опорное
напряж, U<Uопр
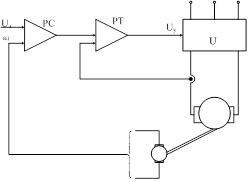
59) – систем содержащих общий ,∑-ий усилитель заключается в сложности настройки параметров цепей ОС по току и по скорости с помощью обшего усил .Подобная настройка всегда носит комтромисткий х-р и м явл оптим для каждого.Этот недостаток устранен в системе ПР.Это система реал принцип последов коррект.Сущность- обьект регулиров представляет в виде последоват соедин звеньев,выходн параметрами кот являются найб существенные координаты(U,I,E,Ф,M,w). Для управленя каждой из этих корд организ свой отдельн р-р. Рег-р вместе собьектом сконтрол координатой образ контур с замкнутой 0С. Регуляторы соед послед(выход одного-вход другого).Замкнутые к-ры обр с-му вписанных др в др контуров.
СПР предст. собой многоконт-ю систему с каскадным включением регуляторов. При этом число регуляторов и контуров регулирования соответ-т числу регулируемых параметров.
Выходной сигнал внешнего регулятора явл-ся задающим для регулятора внутреннего контура.
Достоинства: настройка регуляторов производится независимо от остальных параметров. Настройка от внутреннего к внешнему.Облегчается наладка,сокращается сроки пуска.
Схема реализации
 Структурная схема
Структурная схема
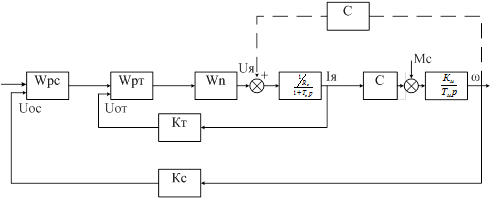
60) При стандартной настройки контура
тока пренебрегаем внутренней ОС по ЭДС. Это
справедливо если ![]() .Тм –механическая
постоянная. Тя-=-электро-магнитная постот. -постоянная преоброзования. Контур
тока содержит ТП и цепь якоря Wобьекта=Wпр+Wцепи.=
.Тм –механическая
постоянная. Тя-=-электро-магнитная постот. -постоянная преоброзования. Контур
тока содержит ТП и цепь якоря Wобьекта=Wпр+Wцепи.= . Обьект содержит
. Обьект содержит ![]() и Тя-инерционн.
и Тя-инерционн.
Задача р-ра заключается в компенсации большой постоянной времени обьекта,а мален нецелесообразно компенсировать из условия помехозащищенности и будем ее наз нескомпенсированной.
Применим Пи р-р тока Wр-ра=Кр-р
тока*![]() . Примем Тр-р=Тя/c
целью компенсации .Тогда Wраз
с-мык-ра тока=Wp*Woб=Крт*
. Примем Тр-р=Тя/c
целью компенсации .Тогда Wраз
с-мык-ра тока=Wp*Woб=Крт* =
=![]() ;К1=
;К1=![]()
Для замкнутога к-ра:Wзам
к-ра=Wраз к-ра/1+Wраз
к-ра*Кт=![]()
Придадим этой ф-ле каноническую форму: Wзк(р)=![]()
![]() -коэф демпфирования
-коэф демпфирования
Ωкт= -резонансная частота
-резонансная частота
Характер переходящих процессов зависит
от коэф демпфирования.Обычно выбирают 𝝃![]() 1тогда п/п будут носить
апериодический х-р (перегулирования нет). В произвожд системах допустимо
некоторая колебательность п/п процессов или небол перегул . Поэтому выбирают𝝃<1
что улучшает динамику(быстродействие). Такой технический подход идал название
р-ра(технический оптимум). При настройки на технический оптимум:𝝃=1/
1тогда п/п будут носить
апериодический х-р (перегулирования нет). В произвожд системах допустимо
некоторая колебательность п/п процессов или небол перегул . Поэтому выбирают𝝃<1
что улучшает динамику(быстродействие). Такой технический подход идал название
р-ра(технический оптимум). При настройки на технический оптимум:𝝃=1/![]() =0.707.тогда К1=
=0.707.тогда К1=![]() ,Кр-р тока=
,Кр-р тока=![]() ,Трт=Тя-нстройки
регулятора на ТО. Передаточная функция оптим к-ра показывает ,что регулятор
компенсируя бол постян времени Т и W
контура тока содержит только один параметр:
,Трт=Тя-нстройки
регулятора на ТО. Передаточная функция оптим к-ра показывает ,что регулятор
компенсируя бол постян времени Т и W
контура тока содержит только один параметр:![]()
Ωкт=![]() =
=![]() --резонанстая
x-та к-ра(полоса
пропускания).Чем ниже постоян времени
--резонанстая
x-та к-ра(полоса
пропускания).Чем ниже постоян времени![]() чем выше Ω, тем выше
диапозон ч –т.
чем выше Ω, тем выше
диапозон ч –т.
61) Пусть W
передаточная оптимизированного к-ра имеет вид Wкт(р)=![]() .
Тогда W разомкн кон-ра
с-ти:Wраз(р)=Крс*
.
Тогда W разомкн кон-ра
с-ти:Wраз(р)=Крс* =Wpc*Wkt*Wмех
часть. При настройки на СО параметр выбирают: Tpc
=8
=Wpc*Wkt*Wмех
часть. При настройки на СО параметр выбирают: Tpc
=8![]() ,
, ![]() ,получаем Wраз(р=
,получаем Wраз(р=![]() ). В результате рег-р
скомпенсировал большую постоянную времени Тм и динамика контра мопределяется
только малой
). В результате рег-р
скомпенсировал большую постоянную времени Тм и динамика контра мопределяется
только малой ![]()
Wзамк
к-ра ск(р)=![]() =
=![]() . Наличие значительной
формирующей стоящ в числителе приводит к пику на частотной х-ке. В обл
низких ч -т , то Wск(р)=
. Наличие значительной
формирующей стоящ в числителе приводит к пику на частотной х-ке. В обл
низких ч -т , то Wск(р)=![]() т е оптим к-р
скорости(КС) м-т приближ представить опериод звеном с постоян времени
т е оптим к-р
скорости(КС) м-т приближ представить опериод звеном с постоян времени ![]() и
к-м демпфиров 𝝃=0.5(при
и
к-м демпфиров 𝝃=0.5(при
![]() ).Наличия
форсированного звена в W
привод и значител перегул (43%) .Время первогодостиж устан з-ния(3.1
).Наличия
форсированного звена в W
привод и значител перегул (43%) .Время первогодостиж устан з-ния(3.1![]() )
т.е быстродействие выше чем настройке на ТО,но перегул выше.
)
т.е быстродействие выше чем настройке на ТО,но перегул выше.
LАЧХ контура скорости настроеннго на ссиметричный оптимум
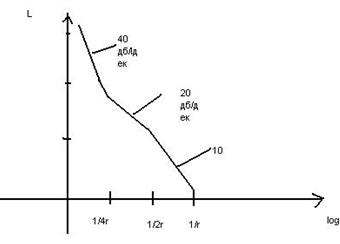 LАЧХ
симметрично относительно ч -ты среза
LАЧХ
симметрично относительно ч -ты среза
62. Частотнае управление АД.Законы регулирования
Принципиальная возможность регулирования скорости вращения двигателя изменением частоты питающего напряжения вытекает из формулы w = 2лf/р. Для получения регулируемой частоты применяются специальные генераторы или преобразователи частоты, питающие один или группу асинхронных двигателей, находящихся в одинаковых условиях работы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.