При регулировании частоты необходимо стремиться к тому, чтобы характеристики во всем диапазоне отличались высокой жесткостью, а двигатель обладал достаточной перегрузочной способностью. Этого можно добиться, сохраняя постоянным магнитный поток. Для асинхронного двигателя можно принять, что U=f1*Ф Поэтому для сохранения постоянства магнитного потока необходимо производить регулирование с неизменным состоянием U/f1=Ф=const.
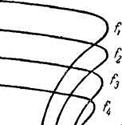 На рис приведены примерные
механические характеристики асинхронного двигателя при регулировании изменением
частоты вращения.
На рис приведены примерные
механические характеристики асинхронного двигателя при регулировании изменением
частоты вращения.
С целью получения переменной частоты применяются различные типы преобразователей частоты. К ним можно отнести преобразователи электромашинные, электронно-ионные и полупроводниковые. Последние особенно перспективны, но еще не получили широкого промышленного применения.
Из электромашинных преобразователей практическое применение получили синхронные и асинхронные.
Схема с синхронным преобразователем частоты показана на рис. Здесь преобразователем частоты ПЧ является синхронный генератор, скорость которого регулируется при помощи двигателя постоянного тока Д по системе Г–Д.
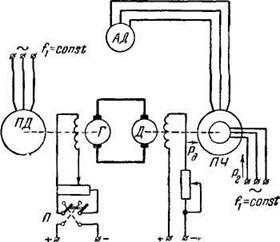
 От синхронного генератора подается ток
переменной частоты к одному
или нескольким асинхронным короткозамкнутым двигателям АД. Изменяя плавно в широких
пределах частоту тока преобразователя ПЧ
, можно в широких пределах регулировать
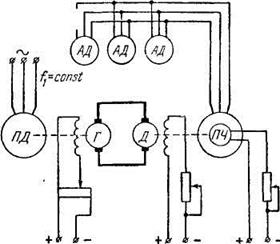
и скорость вращения двигателей АД. Если короткозамкнутые двигатели работают одновременно, то
мощность преобразователя частоты выбирается
равной сумме потребляемых мощностей
всех рабочих двигателей. Каждая из машин постоянного тока и двигатель ПД, приводящий во вращение генератор постоянного тока, должны
иметь мощность, равную мощности преобразователя частоты, если пренебречь потерями в машинах преобразовательной установки. Схема с синхронным генератором
отличается тем, что на его выходе при
неизменном токе возбуждения можно автоматически регулировать частоту и
напряжение по закону U2/f2=const. Однако здесь нельзя получить
значительного диапазона регулирования скорости вращения рабочих асинхронных
двигателей, если требуется сравнительно
большая перегрузочная способность на всем диапазоне, который может
составить примерно (4-5):1. Больший диапазон регулир-я достигается для
механизмов с вентиляторной нагрузкой (до 10:1).
От синхронного генератора подается ток
переменной частоты к одному
или нескольким асинхронным короткозамкнутым двигателям АД. Изменяя плавно в широких
пределах частоту тока преобразователя ПЧ
, можно в широких пределах регулировать
и скорость вращения двигателей АД. Если короткозамкнутые двигатели работают одновременно, то
мощность преобразователя частоты выбирается
равной сумме потребляемых мощностей
всех рабочих двигателей. Каждая из машин постоянного тока и двигатель ПД, приводящий во вращение генератор постоянного тока, должны
иметь мощность, равную мощности преобразователя частоты, если пренебречь потерями в машинах преобразовательной установки. Схема с синхронным генератором
отличается тем, что на его выходе при
неизменном токе возбуждения можно автоматически регулировать частоту и
напряжение по закону U2/f2=const. Однако здесь нельзя получить
значительного диапазона регулирования скорости вращения рабочих асинхронных
двигателей, если требуется сравнительно
большая перегрузочная способность на всем диапазоне, который может
составить примерно (4-5):1. Больший диапазон регулир-я достигается для
механизмов с вентиляторной нагрузкой (до 10:1).
В другом случае в качестве преобразователя частоты используется асинхронная машина с контактными кольцами, возбуждаемая переменным током постоянной частоты Д со стороны ротора. Регулирование частоты достигается благодаря регулированию скорости преобразователя. В отличие от первой схемы здесь часть активной мощности передается в сеть регулируемой частоты из сети постоянной частоты через ротор преобразователя
Достоинством данной системы является возможность независимого регулирования напряжения на входе преобразователя, что обеспечивает на выходе его требуемую зависимость между напряжением и частотой тока, питающего АД. Это позволяет увеличить диапазон регулирования скорости до (10–12) : 1 и выше даже при постоянном моменте нагрузки.
К существенным недостаткам рассмотренных электромашинных преобразователей частоты следует отнести их высокую стоимость, низкий к.п.д., громоздкость, высокий уровень шума и повышенную инерционность.
Указанных недостатков лишены статические преобразователи частоты, наиболее перспективными из которых являются тиристорные преобразователи.
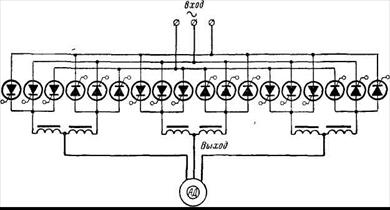 Регулирование скорости
вращения. Асинхронного двигателя изменением
частоты с помощью тиристорных преобразователей
Регулирование скорости
вращения. Асинхронного двигателя изменением
частоты с помощью тиристорных преобразователей
 По структуре схемы
статических преобразователей частоты сходны с аналогичными схемами электромашинных преобразователей и могут быть представлены двумя основными классами:
а) с непосредственной связью
и б) с промежуточным звеном постоянного тока.
По структуре схемы
статических преобразователей частоты сходны с аналогичными схемами электромашинных преобразователей и могут быть представлены двумя основными классами:
а) с непосредственной связью
и б) с промежуточным звеном постоянного тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.