При необходимости можно найти tпп интегрируя dt из ур-ния движения. Для получения exp-ной кривой ω(t) при пуске, необх-мо обеспечить exp-ную зав-ть момента двиг-ля от времени. Как было показано для получения равномерно ускоренного – необх-мо формир-ть прямоуг-ный з-н изменения ω(t). Т.о. формир-ние треб-мых з-нов движения ЭП обесп-ся соотв-щим формир-нием з-на измен-ния усилия.
19.Графич анализ мех-ких ПП при пуске и реверсе с активной нагрузкой Мс.
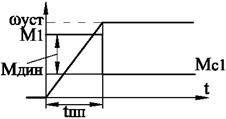
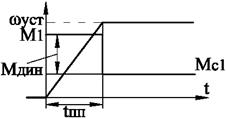
Пуск. Условие: ωНАЧ=0 при t=0;
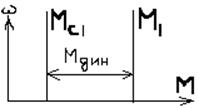
Мдв скачком увелич-ся до М=М1, в этом случ ЭП перех-т в режим
равномерно ускорен движ-ния с ускор-ем  .
Достигнув треб-мой скор-ти момент двиг-ля перевод-ся до значения М1=Мс1.
Ускорение скачком падает до 0, наступает статич режим при ω= ωНОМ.
Достигнув треб-мой скор-ти (ωНОМ) -
.
Достигнув треб-мой скор-ти момент двиг-ля перевод-ся до значения М1=Мс1.
Ускорение скачком падает до 0, наступает статич режим при ω= ωНОМ.
Достигнув треб-мой скор-ти (ωНОМ) -  .
Аналог-но происх процесс перевода ЭП с 1 скорости на др скор-ть.
.
Аналог-но происх процесс перевода ЭП с 1 скорости на др скор-ть.
Т.о. ПП изменение скор-ти обесп-ся измен-ем момента двиг-ля.
Активная Мс (может быть источником движ).
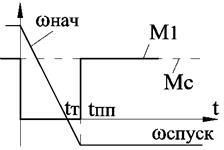
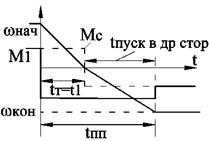
Рассмотрим: был подьем, а нужен спуск груза. Если нагрузка активная, то она
неизменна. При t=0 понадобилось
спустить груз. Выкл-ем двиг-ль при t=0.
При t=0 установим Мдв(M1)=0
(Uя=0). Привод замедляется (но еще
идет подьем) с ускорением  , а скор-ть измен-ся по
з-ну
, а скор-ть измен-ся по
з-ну  . Через время tт
(торможен)
. Через время tт
(торможен)  , ω=0 но под действием активного Мс двиг-ль
начин ускор-ся в противоп направл-нии с возраст скор-тью. Если изменений не
произойдет --> ω может возрасти до опасн значений для двиг-ля, мех-ма и
груза. Когда ω достиг-т нужного значения, Мдв скачком увелич-т до М=Мс и
наступает статич режим ωКОН=const.
, ω=0 но под действием активного Мс двиг-ль
начин ускор-ся в противоп направл-нии с возраст скор-тью. Если изменений не
произойдет --> ω может возрасти до опасн значений для двиг-ля, мех-ма и
груза. Когда ω достиг-т нужного значения, Мдв скачком увелич-т до М=Мс и
наступает статич режим ωКОН=const.
20.Граф анализ мех ПП при пуске и реверсе с реактив нагруз. Мс.
Пуск. Условие: ωНАЧ=0 при t=0;
Мдв скачком увелич-ся до М=М1, в этом случ ЭП перех-т в режим
равномерно ускорен движ-ния с ускор-ем .
Достигнув треб-мой скор-ти момент двиг-ля перевод-ся до значения М1=Мс1.
Ускорение скачком падает до 0, наступает статич режим при ω= ωНОМ.
Достигнув треб-мой скор-ти (ωНОМ) - .
Аналог-но происх процесс перевода ЭП с 1 скорости на др скор-ть.
Т.о. ПП изменение скор-ти обесп-ся измен-ем момента двиг-ля.
Реактивн – меняется знак, при изменении знака ω.
Пусть при t=0 момент двиг-ля
скачком до –М1, тогда ω измен-ся (ЭП тормозится)  . При t>t1,
ωДВ под действием момента двиг-ля М=-М1 меняет свой знак,
что вызывает изменение знака реактивн нагрузки на –Мс1. Мдин резко
уменьш-ся, поэтому скачком уменьш-ся ускорение от
. При t>t1,
ωДВ под действием момента двиг-ля М=-М1 меняет свой знак,
что вызывает изменение знака реактивн нагрузки на –Мс1. Мдин резко
уменьш-ся, поэтому скачком уменьш-ся ускорение от  до
до  ,
, ![]() . Тогда
ω при пуске
. Тогда
ω при пуске  . Время пуска до скор-ти ω=-ωКОН,
. Время пуска до скор-ти ω=-ωКОН,
 . Для перехода к статич режиму ω-ωКОН,
Мдв необх-мо скачком перевести до значения М1-Мс. З-н изм-ния
скор-ти в ПП опред-ся хар-ром измен-ния во времени момента двиг-ля.
. Для перехода к статич режиму ω-ωКОН,
Мдв необх-мо скачком перевести до значения М1-Мс. З-н изм-ния
скор-ти в ПП опред-ся хар-ром измен-ния во времени момента двиг-ля.
23. Устройство и принцип работы ДПТНВ
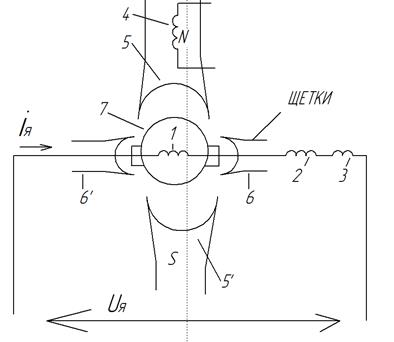 Форма полюса должна быть такова, чтобы
была синусоидальная форма распределения магнитной индукции.
Форма полюса должна быть такова, чтобы
была синусоидальная форма распределения магнитной индукции.
1 Обмотка ротора
2 Обмотка дополнительных полюсов (ДП)
3 Компенсационная обмотка (КО)
4 Обмотка возбуждения
5 Главные полюса
6 Дополнительные полюса
7 Якорь
Усилие:
![]()
Якорная цепь – цепь больших токов.
Обмотки ДП и КО непосредственно в электромагнитном преобразовании не участвуют.
Недостаток: 1)между щетками и коллектором возникают искры, что приводит к огню и выгоранию коллектора. Борются с этим недостатком при помощи дополнительных полюсов.
2) Полюса намагничивают машину, а ротор ее размагничивает. Борются с этим путем дополнительного подмагничивания.
Дополнительные
полюса располагаются вблизи щеток, т.е. в зоне где происходит коммутация
(переключение секций обмоток якоря). Ток в этих секциях резко меняет
направление что вызывает высокую реактивную ЭДС ![]() /
/
Назначение
обмотки ДП: создать дополнительный поток такого направления, чтобы в
коммутируемой секции возникала дополнительная ЭДС примерно равная ![]() и противоположная по направлению.
и противоположная по направлению.
 Тогда суммарная
ЭДС равна 0 и коммутация значительно улучшается. ДП создают узконаправленный
пучок Ф для улучшения процессов коммутации.
Тогда суммарная
ЭДС равна 0 и коммутация значительно улучшается. ДП создают узконаправленный
пучок Ф для улучшения процессов коммутации.
КО –
распределенная обмотка, закладываемая в пазы. Вследствие протекания ![]() по КО создается МДС компенсирующая МДС реакции
якоря, которая оказывает размагничивающее воздействие в машине.
по КО создается МДС компенсирующая МДС реакции
якоря, которая оказывает размагничивающее воздействие в машине.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.