
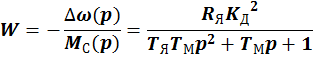
Передаточная функция при возмущении по нагрузке:
По (*) можно составить структурную схему:
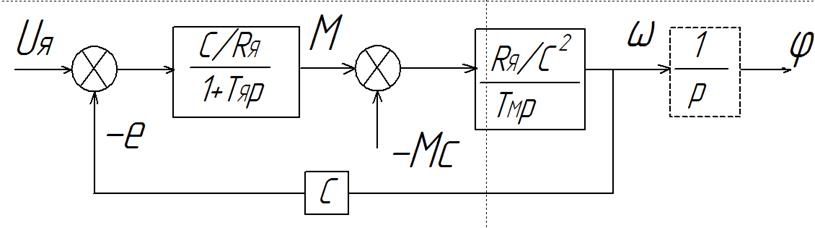
В структурной схеме имеется внутренняя ОС между механической и электрической частями по ЭДС.
Наличие внутренней ОС усложняет анализ,
но при наличии быстродействующих регуляторов инерционностью можно пренебречь,
что упрощает расчет. Частотная характеристика может быть найдена их
передаточной функции путем замены ![]() .
.
![]() – АЧХ
– АЧХ
![]() – ФЧХ
– ФЧХ
27. Каноническая форма представления динамической модели ДПТНВ
Передаточная функция ДПТНВ при возмущении по управлению:

Приведем это уравнение к нормализованному (каноническому) виду:

Где ![]() – резонансная частота
– резонансная частота ![]() – коэф демпфирования
– коэф демпфирования
Характер переходного процесса определяется корнями ХАУ:
![]()
Если ![]() то
то ![]() и корни действительные и различные. Переходный
процесс в этом случае при скачкообразном изменении напряжения якоря носит
апериодический характер:
и корни действительные и различные. Переходный
процесс в этом случае при скачкообразном изменении напряжения якоря носит
апериодический характер:

В современных специальных ЭПах, особенно
станочных, постоянные времени![]() соизмеримы, тогда
соизмеримы, тогда![]() , корни ХАУ получаются
, корни ХАУ получаются
![]() – корни комплексные, сопряженные, характер
переходного процесса колебательный, затухающий вследствие наличия
– корни комплексные, сопряженные, характер
переходного процесса колебательный, затухающий вследствие наличия ![]() . Переходный процесс в этом случае при скачкообразном
изменении напряжения якоря носит апериодический характер:
. Переходный процесс в этом случае при скачкообразном
изменении напряжения якоря носит апериодический характер:

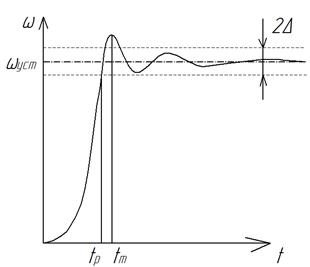
Типовая кривая:
28. Уравнения статических, электромеханических и механических характеристик ДПТНВ
![]()
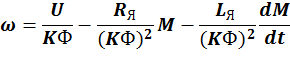
Частный результат математического
описания ДПТНВ в статическом режиме получается из динамического описания при ![]()

При ![]() характеристика линейная. Ее можно построить по 2-м
точкам:
характеристика линейная. Ее можно построить по 2-м
точкам:
1) Идеальный ХХ ![]()
![]()
2) Точка КЗ ![]()
![]()
Важный показатель характеристик – статическая жесткость:

Т.к.  то:
то:
 , где модуль
, где модуль 
Механические характеристики можно представить в различных формах:
![]()
![]()
![]()
![]()
Электромеханическая характеристика:
31 Регулирование угловой скорости ДПТ НВ изменением напряжения на якоре
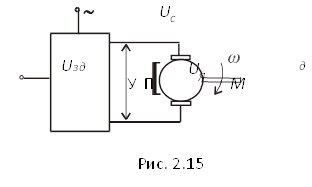 |
На рис. 2.15. показана машина с возбуждением от постоянных магнитов. В случае, когда машина имеет электромагнитное возбуждение, обмотка возбуждения подключается к независимому нерегулируемому преобразователю. Регулирование wд ведется при номинальном потоке возбуждения Ф = Фном, и для анализа удобно использовать уравнения (2.21), (2.22), приняв в них Rд = 0
![]() (2.25)
(2.25)
![]() (2.26)
(2.26)
Первый член в этих
уравнениях определяет угловую скорость двигателя на холостом ходу. Изменяя напряжение
на якоре в сторону снижения, можно на холостом ходу получать скорости ![]() и т.д., т.е. регулировать скорость вниз
от номинальной. Второй член в уравнениях электромеханической (2.25) и
механической (2.26) характеристик определяет падение скорости
и т.д., т.е. регулировать скорость вниз
от номинальной. Второй член в уравнениях электромеханической (2.25) и
механической (2.26) характеристик определяет падение скорости ![]() под нагрузкой. Характеристики при
различных значениях напряжения на якоре располагаются взаимно параллельно (см.
рис. 2.16).
под нагрузкой. Характеристики при
различных значениях напряжения на якоре располагаются взаимно параллельно (см.
рис. 2.16).
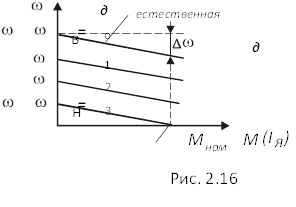 |
При регулировании wдизменением напряжения на якоре в разомкнутой системе
(см. рис.2.15.) нижняя скорость ![]() ограничена падением
скорости от нагрузки. Так, если задать на холостом ходу угловую скорость
ограничена падением
скорости от нагрузки. Так, если задать на холостом ходу угловую скорость ![]() , то при номинальном моменте двигатель
будет останавливаться. В замкнутых системах, как показано далее, падение
скорости может быть сведено до достаточно малых значений. В результате удается
получить диапазон регулирования скорости изменением напряжения на якоре Dи =1000 ... 10000.
, то при номинальном моменте двигатель
будет останавливаться. В замкнутых системах, как показано далее, падение
скорости может быть сведено до достаточно малых значений. В результате удается
получить диапазон регулирования скорости изменением напряжения на якоре Dи =1000 ... 10000.
Таким образом, регулирование скорости изменением напряжения на якоре является основным способом регулирования wд в широкорегулируемых приводах.
Для рассматриваемого
способа регулирования длительно допустимый ток якоря и, соответственно, момент
ограничены номинальными значениями ![]() , т. е. регулирование
wд
изменением напряжения на якоре осуществляется при постоянном допустимом моменте. Длительно допустимая мощность
, т. е. регулирование
wд
изменением напряжения на якоре осуществляется при постоянном допустимом моменте. Длительно допустимая мощность![]()
(2.27)
при
номинальной угловой скорости равна номинальной ![]() и
снижается по мере уменьшения wд
и
снижается по мере уменьшения wд
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.