Обмотка
возбуждения создает основной рабочий магнитный поток. При ![]() практически не приводит к увеличению Ф. При
необходимости изменения Ф его можно только уменьшать.
практически не приводит к увеличению Ф. При
необходимости изменения Ф его можно только уменьшать.
24. Математическая модель ДПТНВ
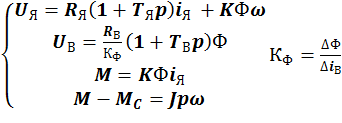
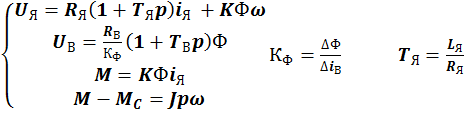
Мат модель может быть получена из анализа обобщенной электрической машины. Но для ДПТНВ ввиду очевидности физических процессов ее можно получить непосредственно. В уравнение войдут:
1) Уравнение электрического равновесия цепи якоря
2) Уравнение электрического равновесия цепи возбуждения
3) Уравнение электро-механической связи
4) Уравнение движения (связь ЭД с механизмом)
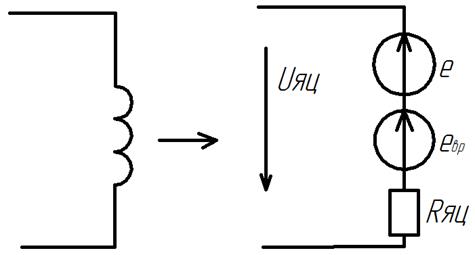
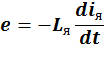
1) ![]() – Электрическая цепь. e – ЭДС
самоиндукции, возникающая в переходных процессах при изменении iя
– Электрическая цепь. e – ЭДС
самоиндукции, возникающая в переходных процессах при изменении iя
2) ![]()
3) ![]()
4) ![]()
Эти 4 уравнения – Система (1)
Влияние на электрическую цепь реализуется через ЭДС вращения:
![]()
![]() - активное сопротивление якорной
цепи.
- активное сопротивление якорной
цепи.
![]() - полная индуктивность якорной цепи
- полная индуктивность якорной цепи
![]() – конструктивный коэффициент
двигателя.
– конструктивный коэффициент
двигателя.
![]() - число пар полюсов
- число пар полюсов
N – число активных проводников якоря, участвующих в создании момента
a – число параллельных ветвей обмотки якоря
Ф – магнитный поток возбуждения
![]() - Индуктивность обмотки возбуждения
- Индуктивность обмотки возбуждения
М – электро-магнитный момент двигателя
Mc – момент сопротивления нагрузки
J – момент
инерции привода ![]()
При расчетах K и Ф отдельно не
используются, а применяется их произведение ![]() ,
, ![]() . Его находят из формулы статического равновесия
цепи якоря.
. Его находят из формулы статического равновесия
цепи якоря. ![]() ,
, ![]()
![]()
Алгебраизируя систему (1) ![]() и вводя обозначения
и вводя обозначения ![]() ,
, ![]() [c] имеем:
[c] имеем:
24. Структурная схема ДПТНВ
 ,
, ![]() [c]
[c]
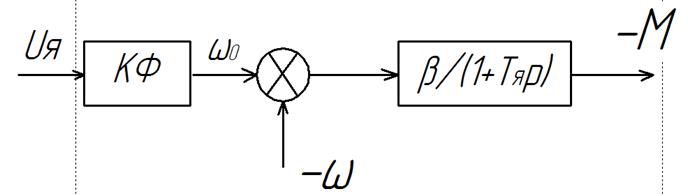
По данным уравнениям можно составить структурную схему:
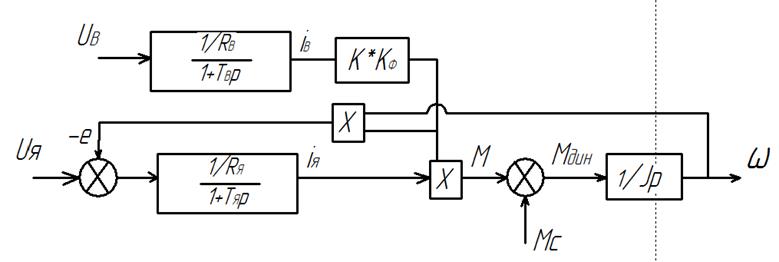
Имеем 2 канала управления:
1) Потоком
2) ![]()
Канал управления полем содержит
апериодическое звено с постоянной времени![]() .
.
![]() - на линейной части. Обычно
- на линейной части. Обычно ![]() в пределах 0.2-5 с, 0.2 – для больших мощностей, 5
с – для малых мощностей. Анализ структурной схемы показывает, что при изменении
потока математическое описание нелинейно, т.к. содержит произведение переменных
величин и для анализа требуется ЭВМ. При номинальном потоке и постоянном токе,
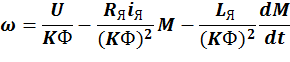
что характерно для ДПТНВ система упрощается. Уравнение механической
характеристики в этом режиме имеет вид:
в пределах 0.2-5 с, 0.2 – для больших мощностей, 5
с – для малых мощностей. Анализ структурной схемы показывает, что при изменении
потока математическое описание нелинейно, т.к. содержит произведение переменных
величин и для анализа требуется ЭВМ. При номинальном потоке и постоянном токе,
что характерно для ДПТНВ система упрощается. Уравнение механической
характеристики в этом режиме имеет вид:
![]()
![]()
Получили уравнение динамической механической характеристики. Можно обратить внимание, что в динамике постоянная времени, т.е. инерционность якорной цепи возрастает.
25. Динамическая модель ДПТНВ
![]()
Получили уравнение динамической механической характеристики. Можно обратить внимание, что в динамике постоянная времени, т.е. инерционность якорной цепи возрастает.
Структурная схема имеет вид:
Если модель рассматривать как
управляющее воздействие для механической системы, то ДПТНВ при постоянном
потоке представляет собой апериодическое звено с постоянной времени![]() .
. ![]() может быть рассчитана по приближенной формуле:
может быть рассчитана по приближенной формуле:
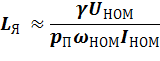
![]() для некомпенсированных ЭД
для некомпенсированных ЭД
![]() для компенсированных ЭД
для компенсированных ЭД
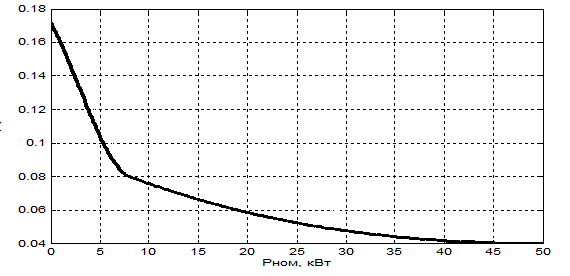
Обычно ![]() . Значение
. Значение ![]() может приводиться в каталогах, если их нет, то
приблизительно можно определить по универсальной кривой
может приводиться в каталогах, если их нет, то
приблизительно можно определить по универсальной кривой
![]() ,
, ![]()
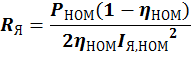
Можно ![]() приблизительно оценить, считая что половина
номинальных потерь приходится на якорь:
приблизительно оценить, считая что половина
номинальных потерь приходится на якорь:

Уравнение динамической характеристики устанавливает связь между скоростью и моментом для любых режимов работы. Форма конкретной механической характеристики зависит от различных факторов:
1) Вида механической системы (есть ли упругость, воздушные зазоры)
2) Начальных условий (стоял или вращался)
3) Управляющих и возмущающих воздействий
26. Частотный анализ ДПТНВ
1) ![]() – Электрическая цепь. e – ЭДС
самоиндукции, возникающая в переходных процессах при изменении iя
– Электрическая цепь. e – ЭДС
самоиндукции, возникающая в переходных процессах при изменении iя
2) ![]()
3) ![]()
4) ![]()
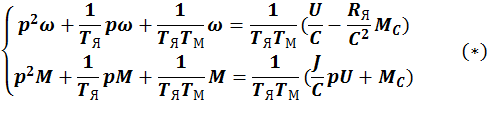
Решая эту систему относительно ![]() при
при ![]() и постоянном моменте сопротивления имеем:
и постоянном моменте сопротивления имеем:

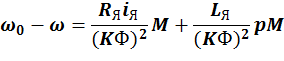
Решая относительно момента при тех же условиях имеем:

Здесь ![]() - скорость холостого хода
- скорость холостого хода
![]() – изменение скорости, вызванное падением напряжения
на
– изменение скорости, вызванное падением напряжения
на ![]() от тока нагрузки
от тока нагрузки
![]() - динамическая составляемая
момента, развиваемая двигателем, вызванная изменением питающего якоря
напряжения.
- динамическая составляемая
момента, развиваемая двигателем, вызванная изменением питающего якоря
напряжения.
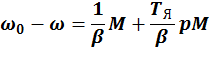
![]() – электро-магнитная постоянная времени
– электро-магнитная постоянная времени
Алгебраизируя имеем:
Передаточная функция ДПТНВ при возмущении по управлению:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.