С учетом отмеченных особенностей этот способ регулирования угловой скорости целесообразно использовать для механизмов, момент сопротивления которых остается постоянным при изменении скорости.
32 Регулирование угловой скорости ДПТ изменением магнитного потока
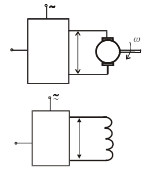
Схема подключения
двигателя для рассматриваемого способа регулирования приведена на рис. 2.17.
Обмотка возбуждения ![]() двигателя подключена к
управляемому преобразователю
двигателя подключена к
управляемому преобразователю ![]() , с помощью которого
изменяется напряжение возбуждения
, с помощью которого
изменяется напряжение возбуждения ![]() и, соответственно
магнитный поток Ф. На якорь двигателя подается напряжение
и, соответственно
магнитный поток Ф. На якорь двигателя подается напряжение ![]() от неуправляемого преобразователя П.
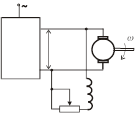
Возможна и иная схема (см. рис. 2.18) – обмотку возбуждения подключают к
неуправляемому преобразователю или сети постоянного тока через реостат R,
с помощью которого регулируют ток возбуждения и магнитный поток.
от неуправляемого преобразователя П.
Возможна и иная схема (см. рис. 2.18) – обмотку возбуждения подключают к
неуправляемому преобразователю или сети постоянного тока через реостат R,
с помощью которого регулируют ток возбуждения и магнитный поток.
 |
 |
||
![]() (2.28)
(2.28) ![]()
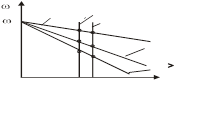
Несложно заметить, что угловая скорость на холостом ходу (первый член уравнений) при уменьшении (ослаблении) магнитного потока Ф увеличивается, что позволяет получить (см. рис. 2.19) характеристики, расположенные выше естественной.
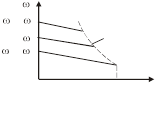 |
Второй член в
приведенных уравнениях – падение угловой скорости под нагрузкой тем больше, чем
больше ослаблен магнитный поток. Следовательно, жесткость характеристик тем
ниже, чем больше ослаблен магнитный поток. Причем, падение скорости на
механической характеристике зависит от Ф2, т.е. при
ослаблении магнитного потока, например, в 2 раза падение угловой скорости при
том же моменте увеличивается в 4 раза.Момент двигателя в соответствии с
уравнением (2.15) снижается пропорционально ослаблению магнитного
потока.Действительно допустимая нагрузка двигателя ограничена номинальным
значением тока якоря ![]() . Предельно допустимый момент
двигателя для этого способа регулирования
. Предельно допустимый момент
двигателя для этого способа регулирования ![]()
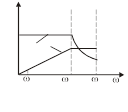
снижается пропорционально уменьшению магнитного потока (кривая допустимого момента показана на рис. 2.19 пунктиром), а предельно допустимая мощность остается постоянной.
С
учетом этого говорят, что регулирование угловой скорости ослаблением
магнитного потока ведется при постоянной допустимой мощности ![]() . Рассматриваемый способ регулирования
достаточно удобен и экономичен, т.к. мощность в цепи возбуждения двигателя
значительно меньше, чем в цепи якоря.
. Рассматриваемый способ регулирования
достаточно удобен и экономичен, т.к. мощность в цепи возбуждения двигателя
значительно меньше, чем в цепи якоря.
Диапазон регулирования Dф изменением магнитного потока определяется отношением наибольшей угловой скорости (wВ по рис.2.19) к скорости wо =wн, соответствующей естественной характеристике. Предельное значение Dф составляет 4…5 и ограничено, в основном, коммутационной устойчивостью машины.
 |
33 Регулирование угловой скорости ДПТ НВвведением добавочных сопротивлений в цепь якоря
Схема подключения
двигателя для этого способа регулирования приведена на рис. 2.9, 2.10. На якорь
и обмотку возбуждения двигателя подается номинальное напряжение: ![]()
Электромеханическая и
механическая характеристики двигателя описываются уравнениями (2.21), (2.22), в
которых принято ![]() ,
,
![]()
![]()
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.