Чтобы увеличить диапазон регулирования скорости, необходимо увеличить жесткость мех.характеристик,что можно достичь введением ОС по скорости Наличие ОС по скорости- признак ЭП с большим диапазоном.
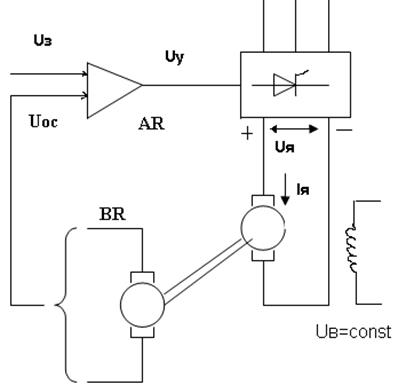
 Схема
реализации:
Схема
реализации:
![]()
 |
![]()
![]()
![]()
![]() Видно что
Видно что ![]()
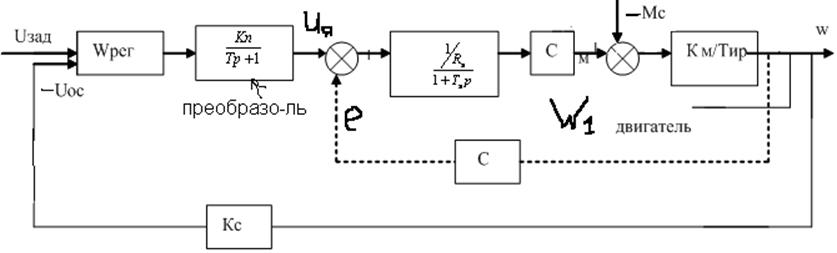
С учетом воздействия на систему управления можно записать:
![]()
Для замкнутой цепи РЭП:
![]() Wрег*Wп*W1[Uзад(p)-Uос(p))-W2*Mc(p)] (2)
Wрег*Wп*W1[Uзад(p)-Uос(p))-W2*Mc(p)] (2)
Т.к. ![]() (3)
(3)
Подставив (3) в (2) и решая
относительно ![]() , получим:
, получим:
![]() (4)
(4)
W1-передаточная функция электрической части двигателя; по управлению U.
W2-по возмущению.Mc
1.Пусть регулятор пропорциональный, тогда Wрег=Кр.
2.Преоб-ль: ![]()
3.Перед.функция по упр.возд-ю:
 =, Кд=1/с
=, Кд=1/с
C учетом внутр ООС по ЭДС (учитыв С)
4.Перед.функция по возм.возд-ю:

В качестве датчика ОС по w возьмем ТГ,будем считать безынерционным:
Подставим конкретное значение в (4):

А(р)=(1+![]() *p)*(Тм*
*p)*(Тм*![]() +Тм*р+1)+К, - ХАУ
+Тм*р+1)+К, - ХАУ
К=Кр*Кп*Кд*Ктг, общий коэффициент усиления
В статике при р=0 имеем:
![]()
Обозначим w0=Крег*Кп*Кд*Uз/1+К,Dw=Км*Мс/1+К.
Жесткость характеристики зависит от К. С увеличением К статическая ошибка уменьшается.
S=Dw/w0=(Км*Мном)/w0*(1+K), следовательно, диапазон увеличивается в (1+К) раз.
Уменьшить S(убрать угол наклона), расширить диапазон можно, увеличивая К, но настолько, чтобы система не потеряла устойчивость.
Определим критерий устойчивости ЭП.
Используем ХАУ А(р). Очевидно, что А(р) следующего вида:
А(р)=а3*р^3+a2*p^2+a1*p+a0,
a3=Tм*Тя*t
a2=Тм*Тя+Тм*t
a1=Тм+t
a0=1+K=K0.
Используем критерий Гурвица:
D=det[a2 a0 0; а3 а1 0; 0 а2 а0]+а0*det[a2 a0; а3 а1], т.к. а0>0, то остается:
det[a2 a0; а3 а1]=а2*а1-а3*а0.
Необходимо определить знак этого выражения, подставляя значение:
D=Тм*(Тя+t)*(Тм+t)-Тм*Тя*t*K0 >0
K< (Тм/t)+(Тм/Тя)+(t/Тя) – условие устойчивости.
57. Регулируемый ЭП с обратной связью по скорости и по току якоря.
РЭП кроме основной ОС имеет ОС по току якоря. Ток
якоря пропорционален моменту( ), поэтому управляя
током мы по сути управляем моментом электродвигателя, и тем самым формируем
силовое воздействие прикладываемое к производственному механизму. Считается,
что ОС по скорости определяет точность РЭП, а ОС по току якоря определяет
быстродействие.
), поэтому управляя
током мы по сути управляем моментом электродвигателя, и тем самым формируем
силовое воздействие прикладываемое к производственному механизму. Считается,
что ОС по скорости определяет точность РЭП, а ОС по току якоря определяет
быстродействие.
Схема РЭП с ОС по скорости и по току якоря:
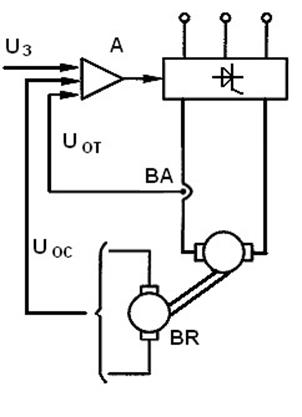 В регуляторе (суммирующий усилитель) происходит
суммирование трёх сигналов.
В регуляторе (суммирующий усилитель) происходит
суммирование трёх сигналов.
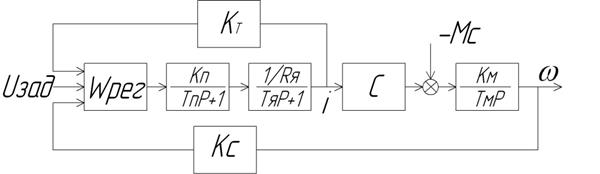
Воспользуемся структурной схемой. C учётом воздействий на систему можно записать:
![]() (1);
(1);
W1-ПФ электрической части двигателя, W2- ПФ механической части двигателя.
Для замкнутой цепи :
![]() (2);
(2);
![]() (3);
(3);
![]() (4); Подставим (3) и (4) в (2).
(4); Подставим (3) и (4) в (2).
Считатя преобразователь инерционным звеном первого порядка, регулятор и цепи ОС(по скорости и по току якоря) безинерционные (пропорциональные) получим:

Жёсткость будет равна: 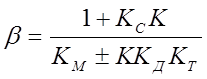 .
.
Из выражений видно что ООС по току якоря уменьшает жесткость, а ПОС наоборот её увеличивает.
Вывод: ООС по току якоря имеет противоположное действие ООС по скорости.
54. Регуляторы ЭП
В ЭП в основном применяют стандартные регуляторы, выполненные на базе ОУ. ОУ имеют несколько каскадов усиления: входной дифференциальный каскад имеет 2 входа: инверт. и неинверт. На инверт. входе ↑ сигнала на входе приводит к ↓ выходного сигнала. На неинверт. – наоборот. ОУ имеет высокое вх. сопрот. Внутренние каскады обеспечивают промежуточное усиление. Выходной каскад – эммитерный повторитель. Он обеспечивает малое выходное сопрот. Кu – коэффициент усиления (103 ÷ 106). Необходима коррекция частотных характеристик, т.к. возможны автоколебания, когда ОУ охватываются ОС. Цепи коррекции индивидуальны. Применяются схемы компенсации уровня выходного сигнала. Регуляторы ЭП строят на основе ОУ, охватываемых ОС. Наибольшее применение нашли следующие регуляторы:
 П-регулятор. ОС
–жесткая.
П-регулятор. ОС
–жесткая.
R1
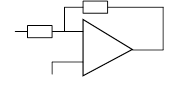
 W(p)=kп
W(p)=kп
Kп=R1/R0
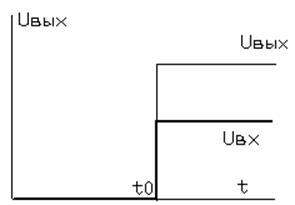
Вид преобразования Uвых=К*Uвх
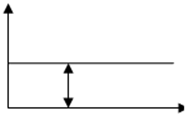
В пределах полосы пропускания ЭП ЛАЧХ регулятора – прямая линия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.