Очевидно, что первое
слагаемое в этих уравнениях ![]() остается неизменным, а
второй член – падение угловой скорости от нагрузки тем больше, чем больше
добавочное сопротивление. Иными словами, с увеличением
остается неизменным, а
второй член – падение угловой скорости от нагрузки тем больше, чем больше
добавочное сопротивление. Иными словами, с увеличением ![]() жесткость
характеристик снижается Если, например, механизм имеет характеристику с
моментом
жесткость
характеристик снижается Если, например, механизм имеет характеристику с
моментом ![]() , не зависящим от скорости, то на
естественной характеристике угловая скорость электропривода определяется т.1
(см. рис. 2.12), а при введении добавочных сопротивлений
, не зависящим от скорости, то на
естественной характеристике угловая скорость электропривода определяется т.1
(см. рис. 2.12), а при введении добавочных сопротивлений ![]() и
и ![]() снижается
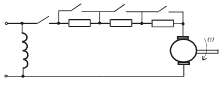
(т.2, т.3). Получаемые при введении добавочных сопротивлений характеристики
называются искусственными – реостатными. Рассматриваемый способ
регулирования имеет ряд существенных недостатков. Во-первых, он не экономичен –
часть энергии подводимой от преобразователя теряется в добавочном
сопротивлении. Во-вторых,
снижается
(т.2, т.3). Получаемые при введении добавочных сопротивлений характеристики
называются искусственными – реостатными. Рассматриваемый способ
регулирования имеет ряд существенных недостатков. Во-первых, он не экономичен –
часть энергии подводимой от преобразователя теряется в добавочном
сопротивлении. Во-вторых, ![]() регулируется
ступенчато, что не всегда удобно. В-третьих, при изменении момента статического
сопротивления угловая скорость изменяется. Так, например, если момент сопротивления
механизма уменьшится до
регулируется
ступенчато, что не всегда удобно. В-третьих, при изменении момента статического
сопротивления угловая скорость изменяется. Так, например, если момент сопротивления
механизма уменьшится до ![]() , (см. рис. 2.12), то
угловая скорость электропривода будет определиться т.т. 4, 5, 6. Этот способ
регулирования используется в основном для механизмов, не предъявляющих жестких
требований и стабильности скорости. К ним относятся, в частности,
грузоподъемные механизмы, устанавливаемые в цехах промышленных предприятий.
Дополнительным обстоятельством, диктующим применение этого способа
регулирования, является наличие сети постоянного тока, например, в автомобилях.
Кроме того, при использовании нерегулируемого источника или сети постоянного
тока включение добавочных сопротивлений необходимо для обеспечения нормального
пуска двигателя. Рассмотрим особенности пускового режима. В начальный момент
пуска угловая скорость и, соответственно, ЭДС двигателя равна нулю. Ток якоря
при этом, как следует из уравнения (2.12), будет
, (см. рис. 2.12), то
угловая скорость электропривода будет определиться т.т. 4, 5, 6. Этот способ
регулирования используется в основном для механизмов, не предъявляющих жестких
требований и стабильности скорости. К ним относятся, в частности,
грузоподъемные механизмы, устанавливаемые в цехах промышленных предприятий.
Дополнительным обстоятельством, диктующим применение этого способа
регулирования, является наличие сети постоянного тока, например, в автомобилях.
Кроме того, при использовании нерегулируемого источника или сети постоянного
тока включение добавочных сопротивлений необходимо для обеспечения нормального
пуска двигателя. Рассмотрим особенности пускового режима. В начальный момент
пуска угловая скорость и, соответственно, ЭДС двигателя равна нулю. Ток якоря
при этом, как следует из уравнения (2.12), будет

 |
Ток
якоря постепенно снижается за счет возрастания ЭДС. Обратите внимание, что
напряжение на обмотку возбуждения подается до подключения якоря к сети. Пуск
двигателя без подачи возбуждения недопустим – в этом случае момент двигателя и
ЭДС будут равны нулю (см. выражения (2.13), (2.15)). По мере разгона двигателя
и снижения тока до некоторого значения ![]() контактом
КМ2 шунтируется резистор
контактом
КМ2 шунтируется резистор ![]() и машина переходит на
характеристику с
и машина переходит на
характеристику с ![]() , и т.д. до выхода на
естественную характеристику (процесс
, и т.д. до выхода на
естественную характеристику (процесс
33-2
разгона на рис 2.14 условно показан стрелками). Добавочные сопротивления подбирают так,
чтобы
переключения происходили при одних и тех же значениях тока (![]() и
и ![]() ).
).
Процесс
разгона заканчивается установившимся режимом в т. а, где момент
двигателя уравновешивается моментом сопротивления механизма ![]() .
.
При автоматическом пуске переключение контакторов осуществляется схемой управления, обычно в функции времени. Схема управления может предусматривать длительную работу двигателя на любой из характеристик, т.е. обеспечивать ступенчатое регулирование угловой скорости (т.т. 1, 2, 3, а на рис. 2.14).
 |
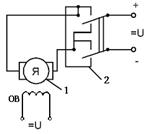
1 – двигатель; 2 – переключатель.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.