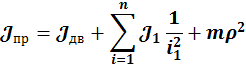
![]() +
+ где
где ![]() - момент инерции ротора двигателя, а
- момент инерции ротора двигателя, а ![]() -- соответствующие механические части:
-- соответствующие механические части:


Пусть ![]() , тогда
, тогда  , где
, где ![]() – радиус приведения, i1- передаточное
число.
– радиус приведения, i1- передаточное
число.
В каталогах вместо ![]() иногда приводят маховый момент
иногда приводят маховый момент ![]() , тогда
, тогда ![]() в системе СИ
в системе СИ ![]() . При приведении
. При приведении ![]() учитывать потери при передаче не следует.
учитывать потери при передаче не следует.
Для практических расчётов при вращательном движении приближённо:
![]() , где
, где ![]() - в справочнике, σ – 1.1 – 1.3(механизмы подъёма,
передвижения кранов); 1.25 – 1.4(механизмы непрерывного транспорта,
компрессоры, работают через редуктор с I < 25)
- в справочнике, σ – 1.1 – 1.3(механизмы подъёма,
передвижения кранов); 1.25 – 1.4(механизмы непрерывного транспорта,
компрессоры, работают через редуктор с I < 25)
Если имеется и поступательное движение
то ![]()
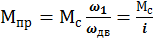
8.8Приведение момента сопротивления
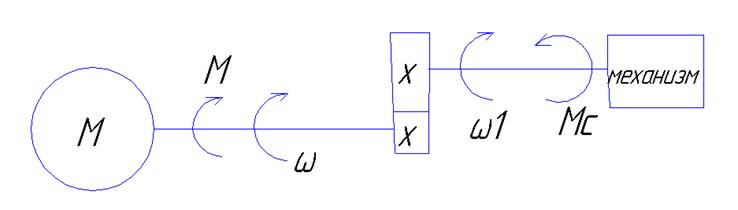
Необходимо привести (пересчитать) Мс на вал двигателя , так мощность должна оставаться неизменной реальной и приведённых схем.
![]()

Если движение поступательное:
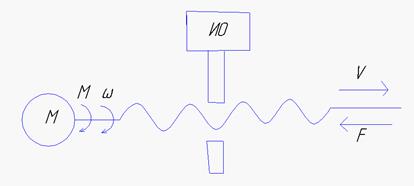
![]()
 ,
, ![]() , где φ – угол поворота
, где φ – угол поворота
Потери в механических передачах в реальных механизмах равенством мощности на приводимых валах нарушаются.
Мощность на валу двигателя или сопротивления будет больше на величину потерь и на трение в передачах, т.е.
![]()
Если известно КПД передачи то потери на
трение могут быть учтены путём увеличения приведённого момента:![]() , где η – КПД.
, где η – КПД.
При поступательном: ![]()
Иногда возникает необходимость выделить из привидённого момента усилие(момент) затрачиваемый на преодоление сопротивления трения:
Обычно КПД механической передачи со скоростью. Можно учесть это изменение по средствам коэфициета β:
Более точно β находится экспериментально.
8.10.Приведениие жесткости механической передачи
При приведении должна сохраняться потенциальная энергия деформации в приведённой и реальной схемах.

![]()
11.Понятие многомассовой механической системы
При проектировании и исследовании ЭП моменты инерции, массы, упругости связи реальных элементов обычно известны. Действующие системы сил(моменты) либо заданны, либо расчитываются по исходным данным механизма и технологии. После приведения их к расчётной скорости(вала двигателя) можно выбрать главные массы (инерционные) и главные упругие связи. Несущественные можно отбросить и на их основе составить приближённую расчётную схему механической части. Исследование динамики ЭП показывает что в большинстве случаев механические системы сводятся к 3-х, 2-ч и одномассовой расчётной схеме.
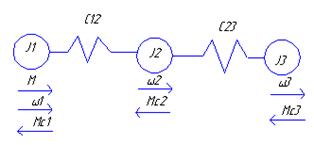
3-х массовая механическая система
 J1—совокупные
приведённые массы эл-тов связи м-ду которыми жёсткие;
J1—совокупные
приведённые массы эл-тов связи м-ду которыми жёсткие;
J2,J3—аналогично; С23, С12 – эквиволентные жёсткости мех. упругих связей м-ду массами: 1-я масса представляет ротор двигателя и жёстко связанные с им элементы. К этой массе приложены электромагнитный момент М и момент статической нагрузки Мс1, который обычно является моментом потерь на валу двигателя и жёстко связанным с ним эл-том. К промежуточной массе J2 приложен момент сопротивления Мс2(обычно вызванный потерями м-ду упругостями), а к третьей приложен момент Мс3(момент нагрузки).
3-х массовая упругая система используется в случаях достаточно детального анализа условий движения масс механизма.
2-х массовая модель:
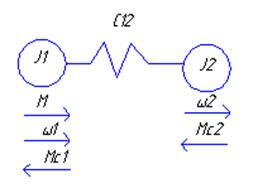
Мс2—нагрузка; J1 – ротор+ жёстко связанные с ним элементы, J2 – механизм и жёстко связанные с ним элементы.
Двухмассовая модель более простая модель ЭП учитывающая упругие связи и является основной при исследовании ЭП.
Одномассовая модель:
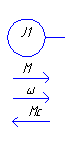 В случаях когда влияние незначительно
используют одномассовую модель – жёсткое привидённое звено. В этом случае
многомассовая механическая часть ЭП заменяется одной эквиволентной массой с
моментом инерции
В случаях когда влияние незначительно
используют одномассовую модель – жёсткое привидённое звено. В этом случае
многомассовая механическая часть ЭП заменяется одной эквиволентной массой с
моментом инерции ![]() , на которую воздействуют Мдв и суммарный момент
нагрузки(технология+трение) приведённые к валу двигателя:
, на которую воздействуют Мдв и суммарный момент
нагрузки(технология+трение) приведённые к валу двигателя: , где n и k – число
масссовершающих вращательное и поступательное движение. Суммарный приведённый к
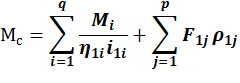
валу двигателя момент статической нагрузки Мс:
, где n и k – число
масссовершающих вращательное и поступательное движение. Суммарный приведённый к
валу двигателя момент статической нагрузки Мс:
12Механическая часть Э.П. как объекта управления (на примере 2-х массовой системы)
Структуру и математическую модель системы можно составить исходя из очевидных физических соображений. В случаях, когда математическая модель и структура не очевидна, ее можно получить из формулы Лагранжа. Уравнение движения позволяет проанализировать динамич. особенности Э.П. механической части как объекта управления. Математическая модель и на ее основе составленная структурная схема являются основой для анализа объекта.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.