Направление тока якоря Iя и ЭДС Е рис.2.9, 2.10 показано для двигательного режима.
Напряжение Uя (В), приложенное к якорю, в установившемся режиме уравновешивается ЭДС Е (В), наведенной в якоре (ее называют также противоЭДС), и падением напряжения в якорной цепи
Uя = Е + Iя(Rя+Rд), (2.12)
где Rя – сопротивление якорной цепи двигателя, Ом, включающее сопротивления обмотки якоря, щеточного контакта, дополнительных полюсов и компенсационной обмотки; Rд – добавочное сопротивление.
ЭДС машины определяется соотношением
Е= сФwд, (2.13)
здесь конструктивный коэффициент
с = рN/ 2pа,
р – число пар полюсов;
N – число активных проводников обмотки якоря;
а – число пар параллельных ветвей обмотки якоря;
Ф – магнитный поток, Вб, создаваемый обмоткой возбуждения или постоянными магнитами.
Подставляя выражение (2.13) для Е в уравнение (2.12) и решая его относительно wд, получим:
wд = ![]() . (2.14)
. (2.14)
Это уравнение устанавливает связь между частотой вращения и током якоря wд = f(Iя) и называется электромеханической характеристикой двигателя.
Электромагнитный момент двигателя (Н×м), определяется током якоря и магнитным потоком:
М = сФIя. (2.15)
Момент на валу двигателя меньше электромагнитного на значение, определяемое потерями в стали и механическими потерями. Для инженерных расчетов этими потерями можно пренебречь, и принять, что момент на валу равен электромагнитному моменту. Тогда, определив из (2.15) ток якоря и подставив его в соотношение (2.14), получим уравнение механической характеристики двигателя:
wд = ![]() .
(2.16)
.
(2.16)
Полученные выражения (2.14), (2.16) для характеристик двигателя представляют собой уравнение прямой. Они справедливы, если пренебречь реакцией якоря.
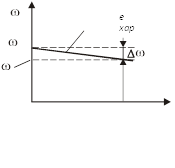
В уравнениях (2.14), (2.16) первое слагаемое представляет собой угловую скорость идеального холостого хода (при этом ток якоря и момент равны 0)
w0 = ![]() . (2.17)
. (2.17)
Второй член в этих уравнениях характеризует статическое падение угловой скорости от нагрузки
![]() или
или ![]() (2.18)
(2.18)
 |
29-2
На рис. 2.11 падение скорости показано для номинального значения момента Mном(тока Iном). При неизменном магнитном потоке момент и ток якоря, как следует из соотношения (2.15) пропорциональны. Поэтому механическая и электромеханическая характеристики двигателя (см. рис. 2.11) отличаются только масштабом по оси ординат. Характеристика, полученная при номинальном значении напряжения на якоре Uном, номинальном магнитном потоке Фном и
отсутствие внешних резисторов в якорной цепи, называется естественной. Жесткость естественной характеристики определяется только сопротивлением якорной цепи двигателя:
![]() или
или ![]() .
(2.19)
.
(2.19)
Снижение скорости wд под нагрузкой объясняется следующим. При увеличении момента сопротивления механизма угловая скорость начинает снижаться. В результате уменьшается ЭДС Е согласно (2.13). Ток якоря при этом, как следует из (2.12) увеличивается. Соответственно возрастает момент двигателя (см. уравнение (2.15)). Этот процесс продолжается до тех пор, пока момент двигателя не сравняется с моментом сопротивления. После достижения равенства М=Мс наступит новый установившийся режим с меньшей угловой скоростью wд.
При инженерных расчетах коэффициенты, входящие в уравнения характеристик двигателя, могут быть определены через номинальные параметры двигателя, приводимые в каталогах. При номинальном магнитном потоке
 (2.20)
(2.20)
Здесь коэффициент Кд
- коэффициент передачи двигателя, его размерность ![]() .
С использованием этого понятия уравнения (2.14), (2.16) могут быть переписаны в
виде:
.
С использованием этого понятия уравнения (2.14), (2.16) могут быть переписаны в
виде:
![]() (2.21)
(2.21)
![]() (2.22)
(2.22)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.