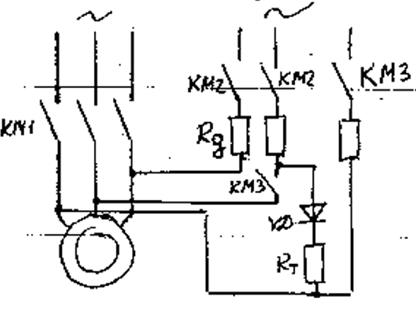
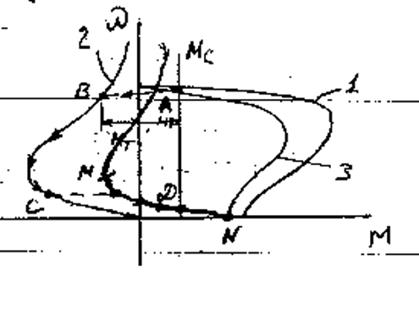
Для перевода в режим дин торможения отключают КМ1 и включают КМ2. В результате АД переходит на х-ку динамического торможения. Примерно в окрестности т. С. (для этого исп. реле времени, реле скорости) благодаря реле включаются дополнительно контакты КМ3; 3-фазное питание от сети через токоограничивающие резисторы Rд, появляется хар-ка 3. Результат – сумма абсцисс на определенной ординате. Из т. С перешли на результирующую характеристику, далее имеет место замедление (анализ моментов), далее переходим в т. D~ в 100 раз меньше номинальной.
Достоинства: результирующая х-ка имеет протяженный участок в отношении моментов,жесткость больше, где работает АД, является устойчивой (участок M N).
Особенность: суммарный ток статора превышает номинальный, поэтому работа в этом режиме допустима только непродолжительное время.2) Нессеметричность токов по фазам и магнит потока создает вибрации, от которых можно избавится при более сложных схемах.
49. Динамическое торможение АС двигателя
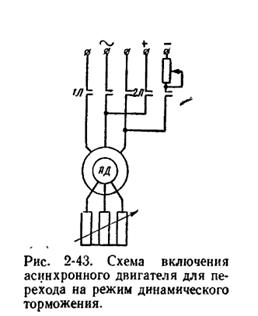
 Динамическое торможение двигателя осущ-ся включением
обмотки статора на сеть постоянного тока, обмотка ротора при этом замыкается на
внешнее сопротивление. Для перехода из двигат-о режима в режим дин. тормож-я
контактор 1Л отключает статор от сети пер. тока, а конт-р 2Л присоединяет
обмотку статора к сети пост-го тока. Для ограничения тока и получения различных
характ-к в цепи ротора ставится сопротивление.Проходя по обмотке статора, пост.
ток образует неподвижное поле, основная волна которого дает синусоид-е
распределение индукции. Во вращающемся роторе возникает перем-й ток, создающий
свое поле, которое неподвижно относ-но статора. В результате взаимодействия
суммарного магнитного потока с током ротора возникает тормозной момент, который
зависит от и.с. статора, Rротора
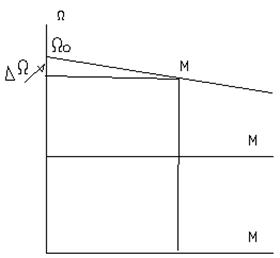
и скорости двигателя.Мех. характеристики проходят через начало координат,
т.к.при скорости, равной нулю, торм. момент =
Динамическое торможение двигателя осущ-ся включением
обмотки статора на сеть постоянного тока, обмотка ротора при этом замыкается на
внешнее сопротивление. Для перехода из двигат-о режима в режим дин. тормож-я
контактор 1Л отключает статор от сети пер. тока, а конт-р 2Л присоединяет
обмотку статора к сети пост-го тока. Для ограничения тока и получения различных
характ-к в цепи ротора ставится сопротивление.Проходя по обмотке статора, пост.
ток образует неподвижное поле, основная волна которого дает синусоид-е
распределение индукции. Во вращающемся роторе возникает перем-й ток, создающий
свое поле, которое неподвижно относ-но статора. В результате взаимодействия
суммарного магнитного потока с током ротора возникает тормозной момент, который
зависит от и.с. статора, Rротора
и скорости двигателя.Мех. характеристики проходят через начало координат,
т.к.при скорости, равной нулю, торм. момент =
52.Основные показатели РЭП.
РЭП х-ся 1)Диапазон регулирования.
![]() от 2-3 до 10000 и более. (Диапазон ограничен
сверху мех прочностью эл-тов и коммутационными ограничениями (дуга,искра);снизу
– устойчивостью вращения при колебательной нагрузке и внутр возмущением
(изменением пар-ров).Зависит от жесткости х-ки, т.е
от 2-3 до 10000 и более. (Диапазон ограничен
сверху мех прочностью эл-тов и коммутационными ограничениями (дуга,искра);снизу
– устойчивостью вращения при колебательной нагрузке и внутр возмущением
(изменением пар-ров).Зависит от жесткости х-ки, т.е ![]()
2) СТАТИЗМ. (Статич. Ошибка
относит ![]() под нагрузкой)
под нагрузкой) ![]()
Статизм задается в числе требований к ЭП технолог процесса
Если ![]() окр
окр ![]() (ищем
(ищем![]() по Sдопуст.)
по Sдопуст.)
Тогда диапазон регулирования ![]()
Чем выше ![]() (отвеч за наклон), тем ниже S
(отвеч за наклон), тем ниже S
Недостатки РЭПа – С ![]() , что ограничивает D.
, что ограничивает D.
пример[D для ДПТНВ ![]() – ур-ние мех-ки.
– ур-ние мех-ки. ![]() ;
;  тк
тк ![]() ;
; ![]()
3) Плавность регулирования ![]() . При абсолютно плавн регултровании
. При абсолютно плавн регултровании ![]() во многом определяется задатч инт-ти.
во многом определяется задатч инт-ти.
4) Коэфф неравномерности. Х-зует
относит колеб ![]() .
. 
Непавномерность – фактор нарушающ
технолог процесса -> приходится ![]() .
.
![]()
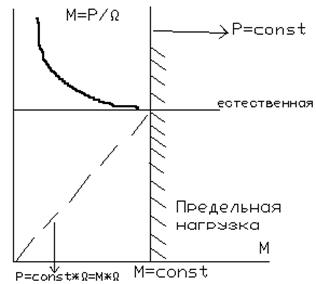
Различ регулировании----1) С предельно допустимой М. 2) с пред. Допустимой Р.
1) При регулир
напряжением (только вниз) KФ=сonst (ДПТНВ)è ![]() è
𝑀
è
𝑀![]() =const. P=M
=const. P=M![]() пропорциональ
пропорциональ ![]() (линейно зависит)
(линейно зависит)
ВЫВОД- регулирование с М=const осущ вниз от основной.
2)Если рег осуществл по токам (U=const) а его можно только уменьшать, то

Момент при этом ![]() - изменяется по гиперболе (регулирование вверх от
основной
- изменяется по гиперболе (регулирование вверх от
основной ![]() )
)
При
регулировании ![]()
 53.Динамические
характреристики привода.Влияние ОС на показатели привода.
53.Динамические
характреристики привода.Влияние ОС на показатели привода.
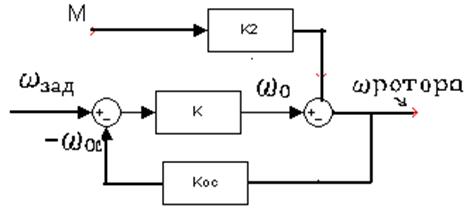
Структрура регулированя ЭП.
Для разомкнутой с-мы вых координата
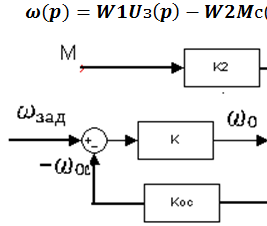
W1,W2 – перед ф-ции по управл и возмущ воздейст.
В статике Uз и Mс = const è![]()
K1,K2- статич коэф преобразования.
Жесткость разомкн с-мы ![]() .
.
Диапазон регулирования ![]()
Введем отриц ОС по ![]() è
è
![]()
![]() M
M
Жесткость х-ки замкнутой системы

K-общ коэф усиления K=Kос*K1
![]() в (K+1) раз – х-ки более жесткие
в (K+1) раз – х-ки более жесткие
Соответственно ![]()
Эффект от введения О0С è D![]() в (1+K)раз
в (1+K)раз
М. показывает, что стабильность раб системы в ООС опр-ся пр-ки стабильностью пар-ров эл-тов ОС
55.Регулируемый ЭП с ООС по скорости.
Cт-ра РЭП опр-ся ОС и сбрист регуляторов, кот.производят обработку инф. с выхода и созд управл возжействия пост. на силовой преобразователь. Наиб распр-нные замкнутые системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.