 На основании схемы можно получить уравнение:
На основании схемы можно получить уравнение:
M -![]() -
- ![]() =
= ![]()
![]()
![]() = (p =
= (p = ![]() ) =
) = ![]() p
p![]()
![]() -
- ![]() =
= ![]()
![]() , =
, = ![]() p
p![]()
 =
= ![]() (
(![]() -
-![]() ), где
), где ![]() =
= ![]() ,
, ![]() =
= ![]()
Где ![]()
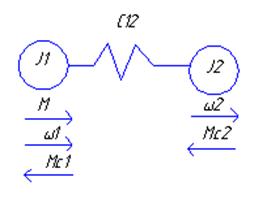
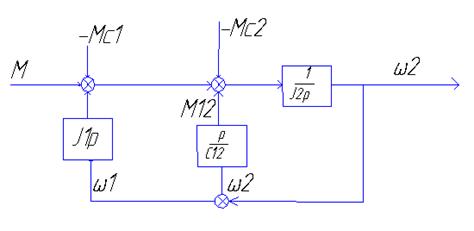
Полученная схема – математическая модель двухмассовой упругой с-мы. На основании уравнений можно составить структурную схему.
Полученная схема – математическая модель двухмассовой упругой с-мы. На основании уравнений можно составить структурную схему.
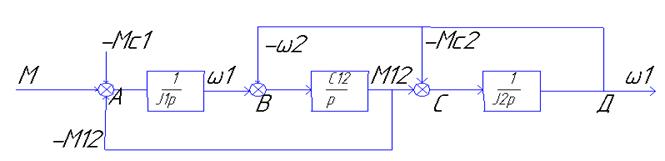 Состоит из 3-х интегрир. звеньев вида
Состоит из 3-х интегрир. звеньев вида ![]() . Управл. воздействием является М.
Возмущаемыми:
. Управл. воздействием является М.
Возмущаемыми: ![]() ,
, ![]() . Регулируемыми переменными могут быть
. Регулируемыми переменными могут быть ![]() ,
, ![]() , перемещение
, перемещение ![]() и
и ![]() , момент
упругого взаимодействия
, момент
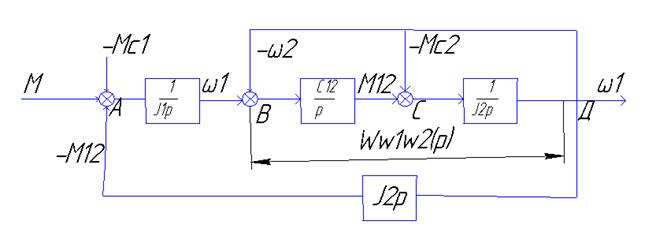
упругого взаимодействия ![]() . Преобразуем
структурную схему. Найдем передаточную функцию по управлению при координате
. Преобразуем
структурную схему. Найдем передаточную функцию по управлению при координате ![]() , а далее
, а далее ![]() . При этом считаем, что
. При этом считаем, что ![]() и
и ![]() равны нулю. Преобразуем структурную
схему: для этого перенесем внутреннюю связь по упругому моменту на выход с-мы
(т. С в т. D).
равны нулю. Преобразуем структурную
схему: для этого перенесем внутреннюю связь по упругому моменту на выход с-мы
(т. С в т. D).
Определяем ![]() =
=  =
= 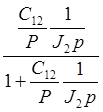 =
= 
Определим ![]() =
=  =
= ![]() (прямого
канала)
(прямого
канала)
Передаточная функция обр. связи при ![]() :
: ![]() =
= ![]() (p) ×
(p) ×![]()
![]() (контура) = =
(контура) = =  =
= 
![]() =
=  =
=  =
= 
ХАУ:  = 0
= 0
![]() = 0;
= 0; ![]() =
=  =
= ![]() , Где
, Где ![]() -
резонансная частота (частота свободных колебаний) двухмассовой упругой с-мы.
-
резонансная частота (частота свободных колебаний) двухмассовой упругой с-мы.
13.Двухмассовая упругая с-ма
представляет собой колебательное звено. ![]() -
частота свободных колебаний и на этой частоте возможно появление мех.
резонанса.
-
частота свободных колебаний и на этой частоте возможно появление мех.
резонанса.
Очевидно, что полученный вид структурной
схемы не единственный. Решив уравнения математической модели относительно ![]() (1-е уравнение в с-ме), а 3-е
относительно
(1-е уравнение в с-ме), а 3-е
относительно ![]() , получим структурную схему:
, получим структурную схему:
В результате анализа получим закон
изменения второй массы ![]() .
.
Если входами считать М, ![]() и
и ![]() , а выходами
, а выходами ![]() , получим структурную схему, позволяющую
анализировать
, получим структурную схему, позволяющую
анализировать ![]() упругих сил.
упругих сил.
1) ![]() = М,
= М, ![]() =
= ![]() ; 2)
; 2) ![]() = М,
= М, ![]() =
= ![]() ; 3)
; 3) ![]() =
= ![]() ,
,![]() =
= ![]()
Продолжим анализ первой схемы.
Рассмотрим подробнее движение 1-ой
массы. Для удобства обозначим ![]() =
=  - соотношение масс.
- соотношение масс.
 ;
;  - резонансная частота второй массы.
- резонансная частота второй массы.
![]() -
(собственные колебания второй массы при жесткой заделке первой, то есть
-
(собственные колебания второй массы при жесткой заделке первой, то есть ![]() )
)
Тогда ![]() =
= 
![]() =
= 
Тогда мех. часть Э.П. можно представить в виде 3-х звеньев:

Тогда передаточная функция ![]() = =
= = ![]() ×
×![]() =
=  (а)
(а)
14. Для анализа
используем частотный метод. Для этого заменим p на ![]() . Тогда движение первой массы:
. Тогда движение первой массы:
 (б)
(б)
где ![]() , а
, а ![]()
Асимптотическая ЛАЧХ могут быть
построены по передаточной функции ![]() =
=  , которую логично представить
последовательным соединением интегрирующего звена, формирующего звена 2-го
порядка с частотой сопряжения
, которую логично представить
последовательным соединением интегрирующего звена, формирующего звена 2-го
порядка с частотой сопряжения  и идеального
колебательного звена с резонансной частотой:
и идеального
колебательного звена с резонансной частотой: ![]() .
.
При ![]() передаточная
функция
передаточная
функция ![]() , так как числитель = 0.
, так как числитель = 0.
log 0 = -![]() и ЛАЧХ
и ЛАЧХ ![]() -
-![]() (1-ый разрыв).
(1-ый разрыв).
При ![]() имеет
место полюс передаточной функции, и амплитуда стремится к +
имеет
место полюс передаточной функции, и амплитуда стремится к +![]() , образуя второй разрыв.
, образуя второй разрыв.
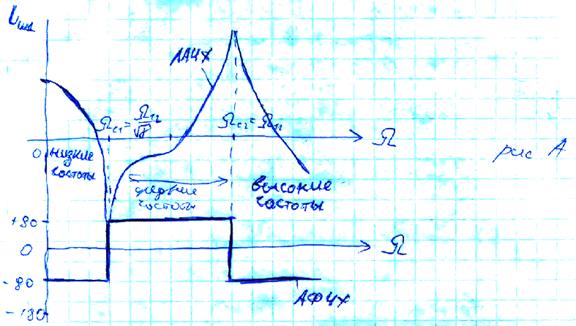
Анализ ЛАЧХ при ![]() (уравнение
б) определяется интегрирующим звеном и составляет -90º. При
(уравнение
б) определяется интегрирующим звеном и составляет -90º. При ![]() (частота среза) скачком меняет знак
числитель (уравнение б), что соответствует уменьшению фазового сдвига на 180º.
Затем на частоте
(частота среза) скачком меняет знак
числитель (уравнение б), что соответствует уменьшению фазового сдвига на 180º.
Затем на частоте ![]() изменяется знак и знаменателя и
фазовый сдвиг опят возвращается к -90º.
изменяется знак и знаменателя и
фазовый сдвиг опят возвращается к -90º.
Построим ЛФЧХ скорости ![]() :
:
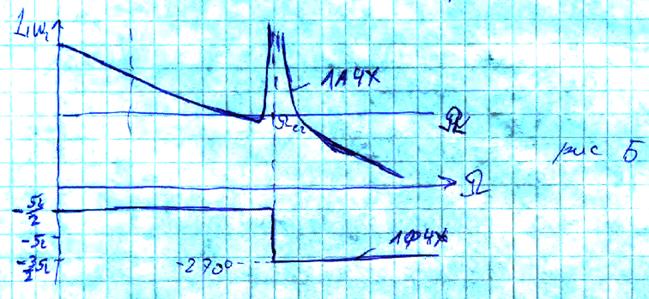
ЛАЧХ и ЛФЧХ при ![]() построили
на основании уравнения а. В этом уравнении числитель =1 и не меняет знак на
всех частотах. Разрыв ЛАЧХ происходит только на частоте
построили
на основании уравнения а. В этом уравнении числитель =1 и не меняет знак на
всех частотах. Разрыв ЛАЧХ происходит только на частоте ![]() .
ЛФЧХ на этой частоте изменяет фазу на «-270º», сохраняя при этом знак (фазовый
сдвиг между колебаниями момента и скорости).
.
ЛФЧХ на этой частоте изменяет фазу на «-270º», сохраняя при этом знак (фазовый
сдвиг между колебаниями момента и скорости).
Указанные характеристики показывают влияние упругости на движение 1-ой и 2-ой массы.
Движение первой массы при низких
частотах колебаний управляющего воздействия М (см. рисунок «а» и формулу «б»)
определяется суммарным моментом ![]() Э.П. Причем мех. часть
ведет себя как интегрирующее звено. Так, при
Э.П. Причем мех. часть
ведет себя как интегрирующее звено. Так, при ![]() изменяется
по линейному закону на который накладываются колебания, обусловленные
колебаниями упругой связи. Интегрирующее звено характериз. условия движения
динамической системы в среднем. При приближении ч-ты колебаний управляющего
момента к резонансной
изменяется
по линейному закону на который накладываются колебания, обусловленные
колебаниями упругой связи. Интегрирующее звено характериз. условия движения
динамической системы в среднем. При приближении ч-ты колебаний управляющего
момента к резонансной ![]() амплитуда колебаний скорости
амплитуда колебаний скорости ![]() (рис.Б) стремится к бесконечности. На
появление резонанса влияют параметры механической части(присутствие
форсирующего звена 2-го порядка). Можно выявить условия при которых влияние
упругости на
(рис.Б) стремится к бесконечности. На
появление резонанса влияют параметры механической части(присутствие
форсирующего звена 2-го порядка). Можно выявить условия при которых влияние
упругости на ![]() будет незначительным. Так из ур-я а) следует
что J1 во много раз
меньше J2, т.е.
будет незначительным. Так из ур-я а) следует
что J1 во много раз
меньше J2, т.е. ![]() →1, а J2 незначительно, то движение
→1, а J2 незначительно, то движение ![]() определяется интегрирующим звеном
определяется интегрирующим звеном ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.