Общие требования к электроприводам: 1) надежность (число отказов). 2) точность, главная функ-я ЭП осуществления управляемого движения (необходимая точность, задаваемая конкретными технологическими пр-ссами). 3) быстродействие. 4) качество динамических процессов (непрерывное наблюдение за процессам). 5) энергетическая эффективность (КПД, cosφ, экономичность). 6)совместимость ЭП с системой энергосбережения и информационной системы. 7) Ресурсоемкость (т.е материала и энергоемкость, заложенные в конструкции) В Японии массовые двигатели 1-10 КВт(материалоемкость уменьшилась в 2.5 раза за счет лучших материалов, качества обработки, качества конструкции.
2) ЭП- называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройства, преднозначеныя для приведения в движения исполнительного органа производственной машины и управления этим движения в целях осуществления технологического процесса.
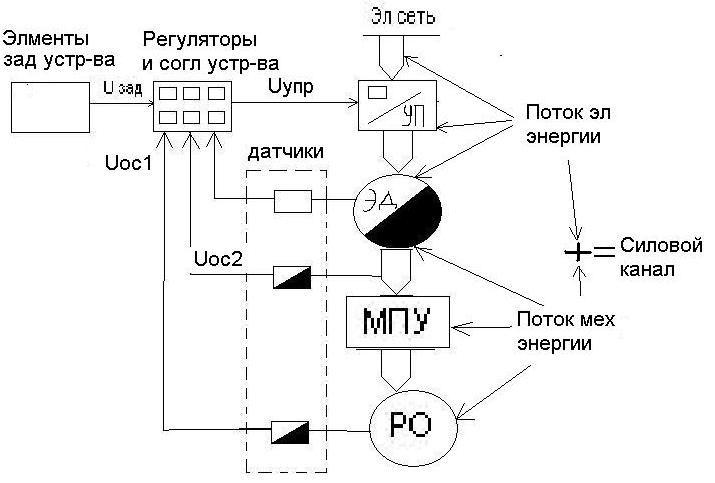
УП- управляемый преобразователь. МПУ- мех-ки преобразующее устройства. Датчики преоброзуют некоторый вид энергии в электрический.
Силовые элементы: сеть, УП ,ЭД ,МПУ ,РО Через них проходит основной поток энергии. Который подводится к конечному ОУ раб органа. Основные элементы канала: ЭД, который осуществляет эл-мехское преобразование энетргии.
Управляемый преобразователь по функциональному признаку: 1) потребитель U ( источник U) –нагрузка меняется ны выходе, а U снимается с преобразователя –const.
2) Преобразователь I (источник I) - нагрузка меняется ны выходе, а ток=const.
3) Преобразователь частоты –в зависимости от способа преобразования энергии преобразователи изменяются: Эл-механические (генераторы пост U тока). Эл-магнитныет (маг. цепи, индуктивно-емкосные источники тока, Эл-кие –п/ПРОВОДНИКОВЫЕ преоброзователи).
Полупроводниковые преоб-ли: 1) теристорные преобразователи переменного тока в постоянный. 2) транзисторные преобразователи пост тока ШИМ-цией.
3-1 и 2 с автономными инверторами и с непосредственной связью с сетью (т.е ведомые сетью) определяет коммутацию в зависимости от места в ст-ре АЭП управляющие элементы могут быть: 1) Эл-ты формирующие задания на движение привода и опр-ют его стат. и динам. признаки. 2) рег-р выполняет преобразование сигнала, необход-мые для регулир. опред-ой координатой(ток, момент, скорость, положение). 3) датчики преобразуют контролируемую координату в эл. сигнал, используемый как сигнал ОС. 4) Согласующие элементы-кот согласуют входные и выходные координаты, соединяемых управляющих эл-тов по техничким характеристикам (роду тока, типу, уровню сигнала и т.д)
3) Класификация ЭП:
1)обычно производят по виду движения: -вращат. поступат. Однанапрвленые и двухнаправленые (реверсивные). Движение: непрерывные дискретные. 2) По принципу регулирования скорости и положения: нерегулир (с одной ω), регулир (ω меняется в соответствии с требованиями ТП), следящий (ω меняется в соответствии с произвольно меняющимся задающимся сигналом), Программно-управляемый (ω меняется по программе), адаптивный(обеспечивают оптимальный режим движ ИО при изменении условий его работы), Позиционный (обеспечивает регулирования положения РО машины).
3) По способу передачи мех энергии в ИО: индивидуальный, взаимосвязанный, групповой.
Индивидуальный- каждый ИО рабочей машины приводиться в движения отдельным двигателем. Это основной вид привода т.к упращ-ся кинематическая передача от двигателя к ИО легче осуществляется. Автоматически улучшаются условия обслуживания работающей машины.
6) Реактивные моменты- моменты, возникшие как реакция на моментдвигателя, или на активный движущийся момент нагрузки. Эти нагрузки всегда деств. На встречу движения. По характеру нагрузки различают: -тиа сухого трения, -типа вязкого трения, -вентиляторного типа
Сух трения:
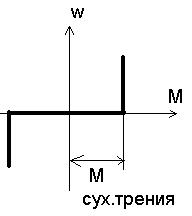 M=|Mc|*sign(ω)
M=|Mc|*sign(ω)
Моменты вязкого трения линейно зависят от скорости Mсопр=βвязкого трения* ω В чистом виде встречается редко, в основном в виде составляющей сухого трения. По характеру влияния на механические колебания моменты делятся на: 1)консервативные 2) Диссипативные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.