L
20 lgkp
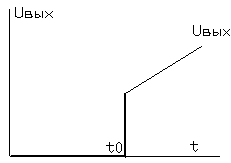
ПИ-регулятор представляет собой союз П и И регулятор.
 R1 C1
R1 C1
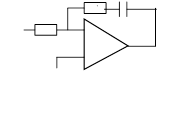 |
![]() W(p)=kп(1+pT1)/pT1
W(p)=kп(1+pT1)/pT1
kп=R1/R0; T1=R1C1
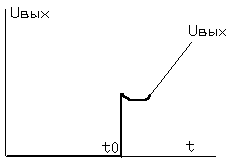
ПИД-регулятор выполняет одновременно действие 3-х регуляторов.
 R1 C1
R1 C1
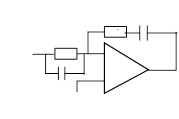 W(р)=kп+1/Тиp+Tдр
W(р)=kп+1/Тиp+Tдр
Wпит(p)=kп(1+pT1)(1+pT2)/pT1
kп=R1/R0; T1=R1C1;T2=R0C0
Этот регулятор достаточно сложен, много параметров настройки, поэтому находит ограниченное применение.
56 дАТЧИКИ ЭП
Датчики тока. В эп применяются измерительные устройства для введения необх. Информации о приводе. Наиб распростран. датчики тока,скорости, магнитного потока. Ток ООС примен по пост или перемен току
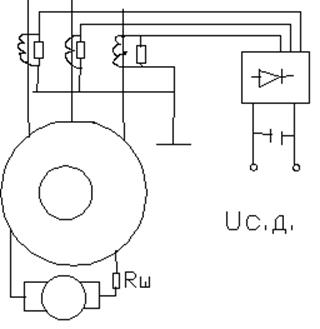
По переменному – трансформаторы тока, которые нагр-т низкоомными рез-ни,чтобы сохранить режим близкий к КЗ. Напряжение снимаесое с ТТ выпрямляется, фильтруется и дальше передается в схему пропорционально переменному току….намагничивание определяется током нагрузки.
 + схемы. Высокая чувствительность (способность
реагировать на малые изменеия) т.к Uвых
достаточно большое (10 ые доли вольта или неск вольт по постоян току) Когда
включили Омы, часть напряжения потеряли. мягкая характеристика. Отпадает
необх-сть в выпрямлении снимаемого напряжении шунта
+ схемы. Высокая чувствительность (способность
реагировать на малые изменеия) т.к Uвых
достаточно большое (10 ые доли вольта или неск вольт по постоян току) Когда
включили Омы, часть напряжения потеряли. мягкая характеристика. Отпадает
необх-сть в выпрямлении снимаемого напряжении шунта
- Отсутствует гальвано развязка между силовыми и цепями управления.невысокая чувствительность требует дальнейшего усиления. Применяют индивидуальные шунты но это снижает жескость мех х-ки двигателя.
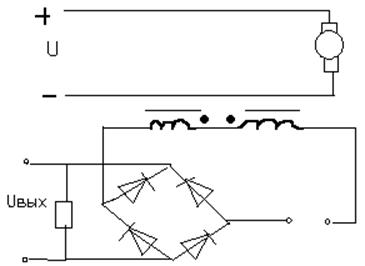
Вместо шунтов примен магнитные усилители – трансформатор постоянного тока.
 --встречное включение катушек. Действие
основано на нелин кривой намагничивания.
--встречное включение катушек. Действие
основано на нелин кривой намагничивания.
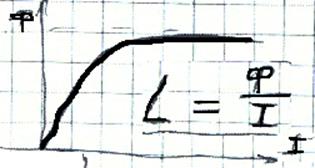
Если I малы, то L max. L èxL=2ПL
Л1,Л2 – первичная обмоткаи вторичная намотаны встречяно. При увеличении тока якоря, который в тоже время является подмагничивающим током, индуктивное сопративление уменьщается,что увеличивает ток. Uвых выпрямляется мостиком. Пост. сосавляющая тока I2 подмагничивает доп сердечник и образует тем самым внутреннюю положительную связь,увеличивающ чувствителтность
+ гальвано развязка и отстутсвие Rдоб в цепи якоря.
Датчик Холла. Выполняется на основе эл-тов Хола,измер-х магнитную напряженность поля, созд магнитым потоком поля.
57. Регулируемый ЭП с обратной связью по скорости и по току якоря.
РЭП кроме основной ОС имеет ОС по току якоря. Ток
якоря пропорционален моменту( ), поэтому управляя
током мы по сути управляем моментом электродвигателя, и тем самым формируем
силовое воздействие прикладываемое к производственному механизму. Считается,
что ОС по скорости определяет точность РЭП, а ОС по току якоря определяет
быстродействие.
), поэтому управляя
током мы по сути управляем моментом электродвигателя, и тем самым формируем
силовое воздействие прикладываемое к производственному механизму. Считается,
что ОС по скорости определяет точность РЭП, а ОС по току якоря определяет
быстродействие.
Схема РЭП с ОС по скорости и по току якоря:
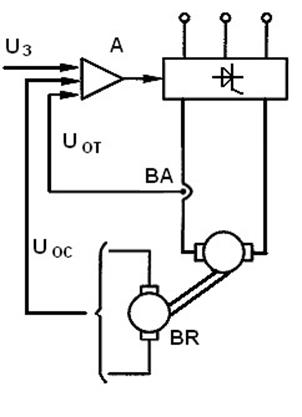 В регуляторе (суммирующий усилитель) происходит
суммирование трёх сигналов.
В регуляторе (суммирующий усилитель) происходит
суммирование трёх сигналов.
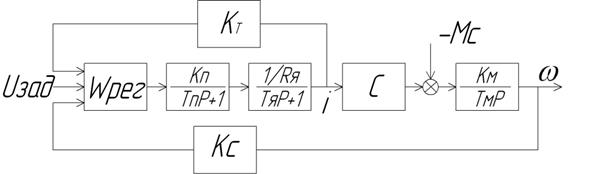
Воспользуемся структурной схемой. C учётом воздействий на систему можно записать:
![]() (1);
(1);
W1-ПФ электрической части двигателя,
W2- ПФ механической части двигателя.
Для замкнутой цепи :
![]() (2);
(2);
![]() (3);
(3);
![]() (4);
(4);
Подставим (3) и (4) в (2).
Считатя преобразователь инерционным звеном первого порядка, регулятор и цепи ОС(по скорости и по току якоря) безинерционные (пропорциональные) получим:

Жёсткость будет равна: 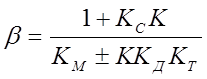 .
.
Из выражений видно что ООС по току якоря уменьшает жесткость, а ПОС наоборот её увеличивает.
Вывод: ООС по току якоря имеет противоположное действие ООС по скорости.
58) В ЭП станков,промышл роботов ,экскаваторов широко применяется ООС по току с отсечкой.
Схема реализации:
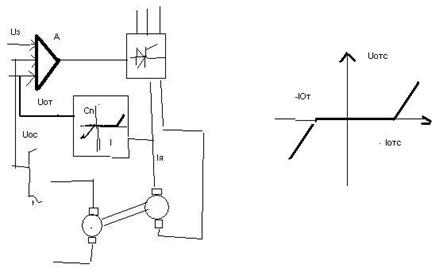 Нелин связь по
току действует:
Нелин связь по
току действует:
Тока Iя<Iотс. Uобр=0,когда Iя>Iотс то вводится сильная OOC по току . В рузультате действие которой механ характ становится очень мягкой.
Uобр связи воздействует
на регулятор через преоброз. Снижает напряжение. В результате чего Iя
поддер. на определенном уровне. При ![]() ,это действие (ограничение тока)
равносильно ограничению момента прикладыв со сторны двигателя к механизму.
,это действие (ограничение тока)
равносильно ограничению момента прикладыв со сторны двигателя к механизму.
Механическая характер состоит из двух участков . На первом участке действует Uоос по w и х-ка прктически жесткая. При больших нагрузках срабатывает отсечка по току и действие м-зма по описан выше.
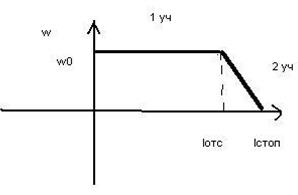 1уч-без
обр связи по току
1уч-без
обр связи по току
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.