Методика определения ПФ и расчет параметров изложены в [4].
1.2. Порядок выполнения работы
1. Ознакомиться с техническим описанием комплектных электроприводов и датчиков.
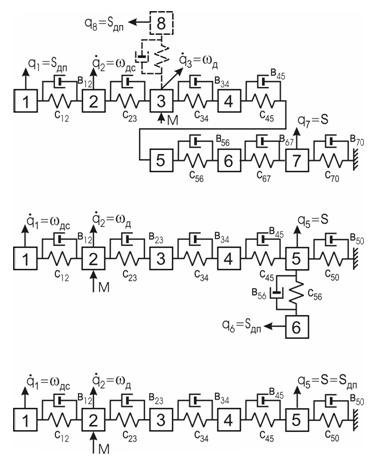
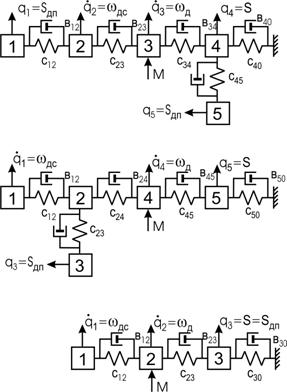
2. В соответствии с заданным вариантом системы рассчитать параметры объекта управления, включая параметры звеньев передаточных механизмов с учетом упругих связей.
 |
 |
 |
3.
По данным механической модели определить матричные уравнения![]() ;
; ![]() ,
соответствующие полной и преобразованной моделям [6].
,
соответствующие полной и преобразованной моделям [6].
4. По матричным уравнениям найти собственные значения матриц G1 и G2. Процедура определения собственных значений выполняется на ПЭВМ.
5.
На основании обобщенной ПФ (1.1) рассчитать параметры и записать соответствующие
ПФ: ![]()
![]()
![]()
6. По полученным ПФ определить амплитудно-фазовые частотные характеристики.
7.
Составить структурную схему объекта управления и всей системы. Считать при
этом, что обратной связью по ЭДС электродвигателя можно пренебречь, а ПФ
замкнутого контура регулирования тока можно представить в следующем виде: ![]() , где i,
, где i, ![]() - соответственно, ток
двигателя и напряжение регулятора скорости;
- соответственно, ток
двигателя и напряжение регулятора скорости; ![]() ,
, ![]() - коэффициент датчика тока и
малая некомпенсируемая постоянная времени контура регулирования тока.
- коэффициент датчика тока и
малая некомпенсируемая постоянная времени контура регулирования тока.
8. Рассчитать параметры регуляторов скорости и положения в соответствии с заданными значениями динамических характеристик замкнутой системы.
9. Составить дифференциальные уравнения, описывающие динамику объекта управления и системы управления в целом.
10. Выполнить на ПК исследование динамических характеристик объекта управления и системы управления для заданных изменений задающих воздействий. Выходной координатой считать положение ИО.
11. Если полученные динамические характеристики не соответствуют заданным характеристикам, произвести на ПК параметрический синтез объекта управления с целью определения параметров, при которых для рассчитанных параметров регуляторов обеспечиваются заданные динамические характеристики.
Работа 2
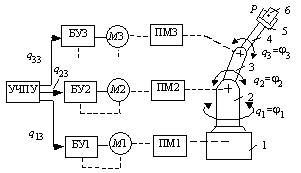
СЕРВОПРИВОДОВ ПРОМЫШЛЕННОГО МАНИПУЛЯТОРА
Целью работы являются: исследование динамических свойств взаимосвязанных систем управления движением звеньев промышленного манипулятора при различных настройках регуляторов; изучение состава технических средств управления.
2.1. Содержание работы
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.