На основе заданных технологических режимов пуска, останова и рабочего функционирования станка необходимо выполнить математические описания, расчеты и исследования на ПК системы управления станком с учетом упругих свойств электроприводов и бумажного полотна, а также изменяющихся в процессе перемотки параметров механической части системы. Механические части электроприводов от электродвигателей до валов следует рассматривать как двухмассовые механические системы. При расчете систем использовать [1], [5], [6].
Механическая
модель станка с учетом упругих свойств электроприводов и натянутого неподвижного
полотна показана на рис. 6.2, а. В модели не учитываются малые
инерционные массы ВВ и Н. Все параметры системы приведены к вращательным
движениям и механизмам станка. При движении полотна кроме внутреннего
демпфирования проявляется скоростное демпфирование и усилие натяжения ![]() определяется из формулы
определяется из формулы
 ;
;  ,
,
где ![]() -
относительное удлинение полотна,
-
относительное удлинение полотна, ![]() -
оператор дифференцирования.
-
оператор дифференцирования.
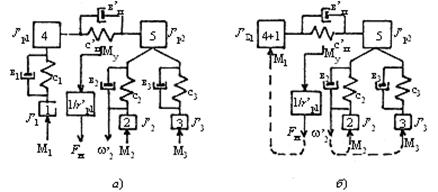
Рис. 6.2
Более
подробно математические описания даны в [1] и в [5]. С учетом того, что на
раскате применяются ″короткие″ кинематические передачи или они вообще
отсутствуют, упругими деформациями в приводе 1 можно пренебречь. Механическая
модель для этого случая с учетом обратных связей по натяжению ![]() и частоте вращения
и частоте вращения ![]() вала В1 показана на рис. 6.2, б.
Расчет собственных частот колебаний механической системы можно выполнить на ПК
аналогично тому, как это делалось в работе 1.
вала В1 показана на рис. 6.2, б.
Расчет собственных частот колебаний механической системы можно выполнить на ПК
аналогично тому, как это делалось в работе 1.
Предварительную оценку значений частот колебаний получают
из приближенных формул, которые могут быть записаны при условии, что ![]() .
.
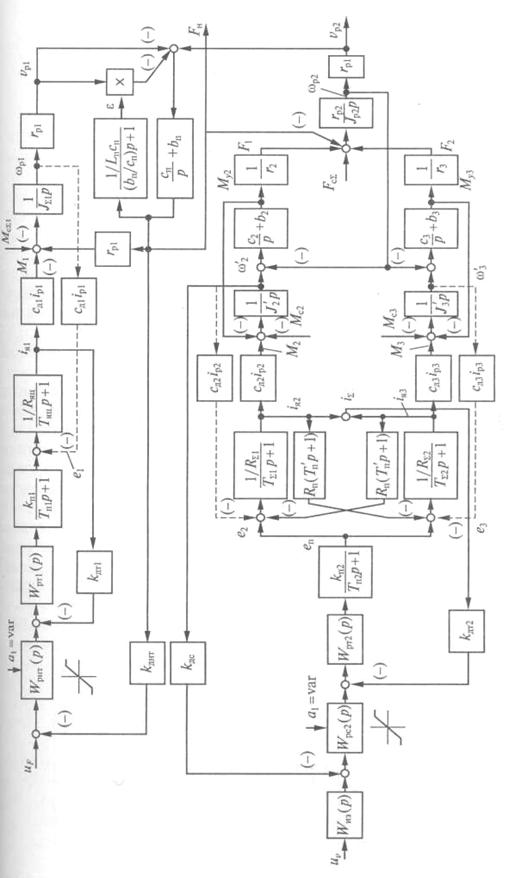
Структурная схема системы управления станком показана на рис. 6.3.
 |
Исходными данными к выполнению лабораторной работы являются: данные станка, комплектных электроприводов и датчиков; параметры упругих свойств полотна и механической части приводов; режимы работы станка; характеристики управляющих и возмущающих воздействий.
6.2. Порядок выполнения работы
1. Ознакомиться с техническими описаниями комплектных электроприводов, датчиков и средств УВК.
2. Составить математические описания процесса управления линейной скоростью движения полотна и его натяжением с учетом упругих свойств приводов и бумажного полотна.
3. Выбрать и рассчитать регуляторы сепаратных систем управления.
4. Подготовить данные для исследования системы на ПК.
5.
Провести исследование системы управления в режиме рабочего функционирования для
заданных начальных значений переменных с учетом изменяющихся параметров в
процессе перемотки. Определить изменяющиеся параметры регуляторов (составляющие
векторов ![]() и
и ![]() )
и их значения, при которых обеспечивается стабилизация динамических характеристик
системы управления.
)
и их значения, при которых обеспечивается стабилизация динамических характеристик
системы управления.
6. Провести исследование взаимного влияния сепаратных систем управления и при существенном проявлении этого влияния устранить его, изменяя настройки регуляторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.