Для расчета осевых колебаний судовой валопровод заменяется
дискретной моделью. Последняя составляется аналогично модели для крутильных
колебаний с тем отличием, что вместо величин моментов инерции вращающихся масс
и крутильных податливостей рассматриваются величины масс ![]() и осевые податливости
и осевые податливости ![]() .
.
Безразмерные параметры расчетной модели для исследования осевых колебаний обозначают следующими символами:
– безразмерная масса
 ;
;
– безразмерная осевая податливость
 ,
,
где ![]() – обычно масса колена вала;
– обычно масса колена вала; ![]() – его податливость.
– его податливость.
Расчетная модель, как и в случае крутильных колебаний,
изображается совокупностью кружков, соединенных между собой отрезками прямых.
Площади кружков приблизительно пропорциональны ![]() , а
длины отрезков точно пропорциональны осевым податливостям участков валопровода
, а
длины отрезков точно пропорциональны осевым податливостям участков валопровода ![]() .
.
На рис. 5.34 в качестве примера представлена дискретная
модель судового валопровода для расчета осевых колебаний. Ответвление аппроксимирует
главный упорный подшипник с параметрами ![]() и
и ![]() , характеризующими упругомассовые свойства
упругого подшипника, упругого гребня и части упругого вала. Жесткая заделка
конца ответвления соответствует бесконечно большой массе корпуса судна. Наклон
отрезка
, характеризующими упругомассовые свойства
упругого подшипника, упругого гребня и части упругого вала. Жесткая заделка
конца ответвления соответствует бесконечно большой массе корпуса судна. Наклон
отрезка ![]() выбран произвольно (возникающая в нем
упругая сила направлена всегда вдоль оси вала).
выбран произвольно (возникающая в нем
упругая сила направлена всегда вдоль оси вала).
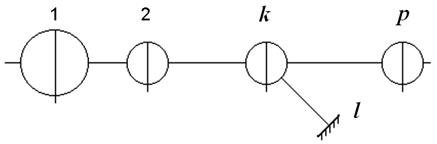
Рис. 5.34. Дискретная модель судового валопровода
Данная модель будет тождественна, если отсутствует перекладка зазора в упорном подшипнике. Если в результате предварительного расчета обнаружится, что амплитуда осевой упругой силы на участке, где расположен гребень упорного подшипника, превышает среднее значение упора гребного винта, то в нем возникает перекладка зазора. В этом случае массу корпуса упорного подшипника следует учитывать особо, рассматривая ее в качестве промежуточной массы ответвления. Последняя будет связана с предыдущей соединением с зазором, которое всегда обладает нелинейной характеристикой, а поэтому вся система становится нелинейной.
Примерно также идеализируется демпфер осевых колебаний. Он
заменяется тремя массами: одна – масса гребня (![]() ),
другая– масса корпуса демпфера (
),
другая– масса корпуса демпфера (![]() ), третья – масса
основания (жесткое защемление). Все массы связаны соответствующими жесткостями,
кроме того, в схеме присутствует демпфирующий элемент
), третья – масса
основания (жесткое защемление). Все массы связаны соответствующими жесткостями,
кроме того, в схеме присутствует демпфирующий элемент ![]() .
.
При расчете осевых колебаний наличие редуктора в системе не приводит к трансформации упругомассовых свойств. Между тем, наличие в установке редуктора с прямозубыми колесами (если не считать сил трения) изолирует ведущую часть валопровода от ведомой. Значительно более сложной получается дискретная модель в случае косозубых передач, так как при наличии перекладки зазора в зубчатом зацеплении перекладки зазора в зубчатом зацеплении осевые колебания становятся нелинейными.
При составлении дискретной модели сосредоточенными условно считают такие массы деталей, длина которых менее полутора-двух диаметров вала. Деформацией таких масс можно пренебречь и учитывать только их инерционные свойства. Такие массы сосредоточивают в центрах тяжести рассматриваемых элементов. К сосредоточенным массам могут быть отнесены: гребной винт, колеса редуктора, маховики.
Масса гребного винта оценивается массой самого винта ![]() и массой увлекаемой им воды
и массой увлекаемой им воды ![]() :
:
![]() .
.
Ориентировочно массу ММ можно определить по формуле (5.10) или так
![]() ,
,
где ![]() – масса ступицы гребного винта,
кг,
– масса ступицы гребного винта,
кг,
 ;
;
![]() – масса лопастей гребного винта, кг,
– масса лопастей гребного винта, кг,
 ,
,
![]() – длина
ступицы, м;
– длина
ступицы, м; ![]() – наружный диаметр ступицы, м;
– наружный диаметр ступицы, м; ![]() – средний диаметр конуса гребного вала, м;
– средний диаметр конуса гребного вала, м;
![]() – дисковое отношение;
– дисковое отношение; ![]() – диаметр гребного винта, м;
– диаметр гребного винта, м; ![]() – плотность материала ступицы и лопасти.
– плотность материала ступицы и лопасти.
Массу увлекаемой винтом воды принимают в
пределах ![]() = (0,4÷0,6)
= (0,4÷0,6) ![]() или рассчитывают по формуле
или рассчитывают по формуле
 ,
,
где ![]() – шаговое отношение;
– шаговое отношение; ![]() – число лопастей.
– число лопастей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.