Существует два подхода к организации управления.
Первый – жесткое (схемное) управление.
Второй - микропрограммное управление
Схемы, поясняющие эти способы организации управления, приведены на рисунках 7.8 и 7.9.
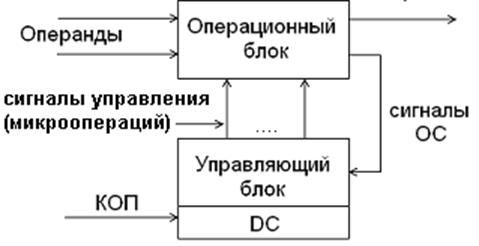
Рисунок 7.8 – Схема жесткого управления
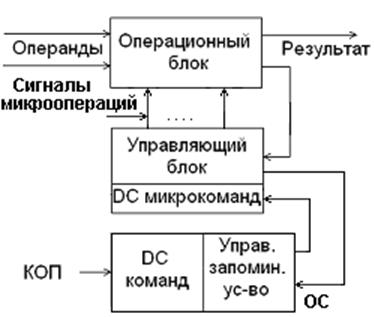
Рисунок 7.9 – Схема микропрограммного управления
Под действием кода операции (КОП) в управляющем блоке дешифратор команд (DC) запускает микропрограммный автомат, который в нужной последовательности вырабатывает сигналы микроопераций, которые в свою очередь порождают в операционном блоке требуемую обработку операндов. Грубо говоря, сколько команд – столько автоматов, при этом если требуется заменить код на другой, то выбирается другой микропрограммный автомат. Такая схема громоздкая и жесткая (изменить схему и список команд нельзя), но ее быстродействие достаточно высокое. Такой МП называется МП с фиксированным списком команд.
В управляющем запоминающем устройстве (УЗУ) хранятся микропрограммы различных операций. Под действием кода операции, дешифратор команды выбирает в УЗУ нужную микропрограмму, считывает из неё первую микрокоманду и передаёт её в управляющий блок, в котором дешифратор микрокоманды запускает требуемый микропрограммный автомат, вырабатывающий сигналы микроопераций для операционного блока и сигнал ОС на считывание следующей микрокоманды из УЗУ и т.д. пока ни будет выполнена вся микропрограмма данной операции. Такое управление имеет гибкую систему команд. Меняя УЗУ можно изменить список команд. Это так называемые аморфные машины. У них низкое быстродействие, т.к. здесь происходит многократное обращение к ЗУ, т.е. быстродействие всей системы определяется быстродействием блока памяти. Создание нужных команд тоже не простая задача. Эти МП выпускают обычно сразу с определенным (базовым) списком команд, который при необходимости видоизменяют.
Иерархию управления можно представить схематично в виде рисунка 7.10.
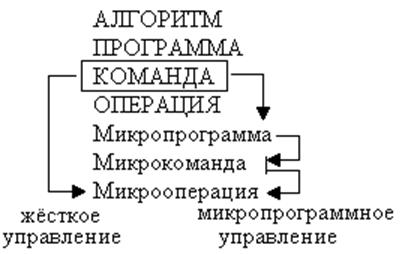
Рисунок 7.10 – Иерархия управления
Рассмотрим структурную схему обрабатывающей части микропроцессора с элементами жесткого управления. Она приведена на рис.7.11.
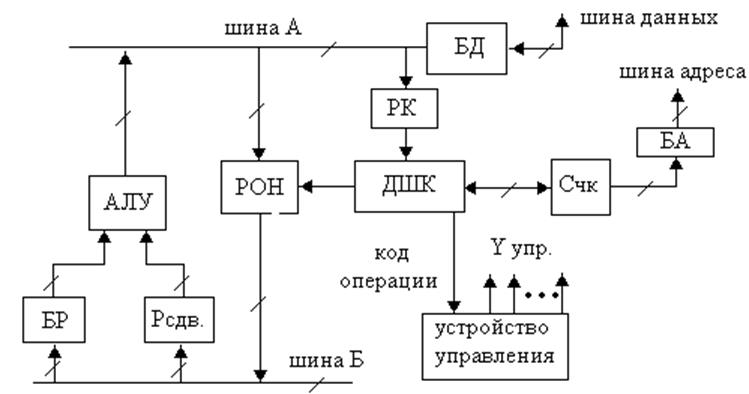
Рисунок 7.11 – Схема МП с элементами жесткого управления
Адрес команды, подлежащей выполнению хранится в специальном регистре – счётчике команд или программном счётчике (Счк или РС –program counter). Этот адрес через буфер адреса (БА) по шине адреса поступает во внешнее запоминающее устройство (ЗУ), где хранится программа. Из программы считывается код команды и по шине данных через буфер данных (БД) он поступает на внутреннюю шину данных (шина А) и далее в регистр команд (РК), где он будет храниться на протяжении всего времени выполнения команды. Код команды расшифровывается дешифратором команды (ДШК), который анализирует отдельные поля команды и передает код операции в устройство управления, выходными сигналами которого охвачены все элементы МП. Результат операции может быть помещён в один из РОН или во внешнее ЗУ. В последнем случае ДШК передаёт в Счк адрес ячейки памяти, куда поместить результат, а сам результат передаётся через БД и шину данных в память.
7.4 Общие сведения о микропроцессорах
Микропроцессор (МП) – функционально законченное устройство обработки цифровой информации, управляемое хранимой в памяти программой и выполненное в виде одной или нескольких БИС.
Термин «микропроцессор» был впервые употреблен в 1972 г, хотя годом рождения следует считать 1971 год, когда фирма Intel выпустила МП серии 4004 – «интегральное микропрограммируемое вычислительное устройство». Это был однокристальный процессор, имеющий 4-х разрядный параллельный сумматор, 16 четырёхразрядных регистров, накапливающий сумматор и стек. Он был реализован на 2300 транзисторах, работал на частоте 750 кГц и мог выполнять 45 различных команд. С тех пор МП стал элементом, заменяющим сотни типов заказных БИС с фиксированной логикой и пригодным для реализации самых различных функций по обработке информации и управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.