Если сигнал С=1, то первая ступень находится в режиме приема информации, а вторая - в режиме хранения, так как сигнал синхронизации на её входе равен нулю. Если С=0, то первый триггер переходит в режим хранения, а второй - в режим приема информации и копирует состояние первого триггера. Именно в этот момент информация появляется на выходе триггера (Q).
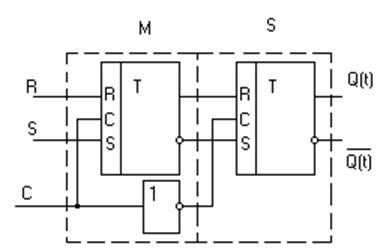
Рисунок 4.32 – Двухтактный RS – триггер
Двухтактный триггер обозначается двумя буквами Т (рис. 4.33).
Рисунок 4.33 – Изображение двухтактного RS – триггера
Зачем нужны
двухтактные триггеры? Во-первых, они имеют высокую помехоустойчивость, а
во-вторых, с помощью двухтактного D – триггера можно задержать
сигнал на время равное периоду синхронизации (в однотактных - только на
время паузы).
Это поясняется эпюрами рис. 4.34 . ![]() .
.
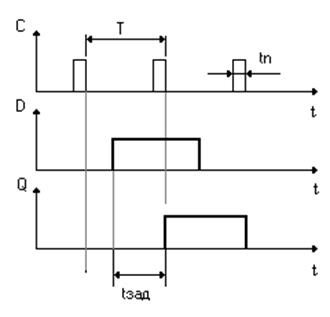
Рисунок 4.34 – Задержка сигнала в двухтактном D - триггере
Имея двухтактный D – триггер, несложно получить асинхронный T – триггер (рис. 4.35).
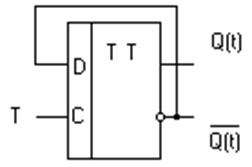
Рисунок 4.35 – Асинхронный Т – триггер на основе
двухтактного D - триггера
Вообще, любой триггер можно синтезировать на любом другом типе триггера, воспользовавшись словарём переходов последнего.
4.3 Способы управления триггерами
В зависимости от того, какая часть синхросигнала вызывает опрокидывание триггера, все триггеры делят на статические и динамические. Статические триггеры управляются уровнем сигнала - это потенциальные триггеры. Они опрокидываются, когда уровень синхросигнала выше некоторого порога Uпор (рис.4.36).
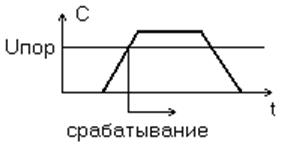
Рисунок 4.36 – Синхросигнал триггера
Такие триггеры
воспринимают любую информацию со своих входов, если С![]() Uпор, то есть триггер “прозрачен”
для входной информации. В некоторых случаях это неудобно, поэтому в триггерах c динамическим
управлением информация воспринимается только во время перехода синхросигнала
0
Uпор, то есть триггер “прозрачен”
для входной информации. В некоторых случаях это неудобно, поэтому в триггерах c динамическим
управлением информация воспринимается только во время перехода синхросигнала
0 ![]() 1 или наоборот. Все остальное время
информационные входы блокированы, как в двухтактных триггерах (0
1 или наоборот. Все остальное время
информационные входы блокированы, как в двухтактных триггерах (0![]() 1 прямое динамическое управление; 1
1 прямое динамическое управление; 1![]() 0 обратное динамическое управление).
0 обратное динамическое управление).
Обозначения различных синхровходов показаны на рис. 4.37:
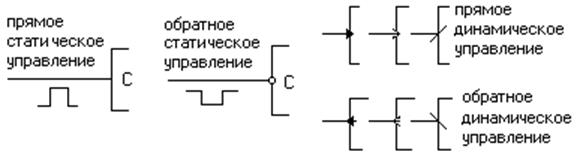
Рисунок 4.37 – Обозначения синхровходов триггеров
Синхровход в двухтактных триггерах всегда обозначается как статический.
Рассмотрим влияние типа управления на выходные сигналы триггера. Возьмем пять D-триггеров с различными типами синхровходов, как показано на рис. 4.38
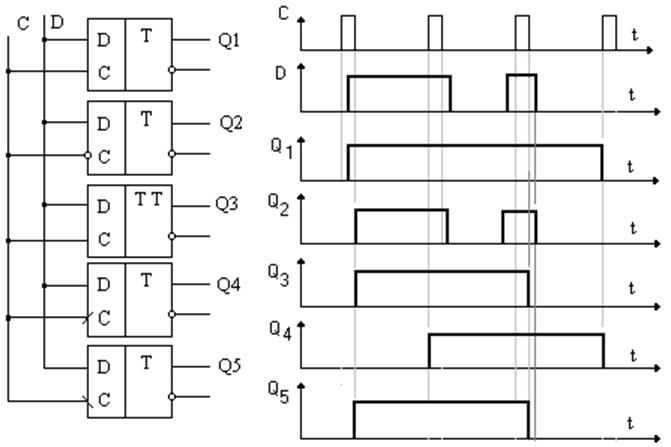
а) б)
Рисунок 4.38 – Влияние типа управления на выходные
сигналы D – триггера
Видно, что реакция триггера с обратным динамическим управлением и двухтактного триггера одинакова. Очевидно, что помехоустойчивость триггеров с динамическим управлением выше, чем статических. В динамических триггерах помеха может пройти на выход только, если она по времени накладывается на фронт синхроимпульса.
5 Элементы цифровых устройств
5.1 Уровни представления вычислительных устройств
Вычислительные устройства относятся к классу сложных устройств и в зависимости от минимальной неделимой единицы различают четыре уровня их представления:
1) Уровень электрических схем.
Здесь минимальной неделимой единицей является радиокомпонент (диод, резистор, конденсатор, транзистор и т.д.). Для анализа и синтеза этих схем используют дифференциальные уравнения для токов и напряжений, законы Кирхгофа. Такой уровень представления допустим, когда число компонентов не превышает 10 … 20.
2) Уровень логических схем.
Здесь минимальной неделимой единицей являются логические и запоминающие элементы, каждый из которых содержит до тысячи радиокомпонентов. Для анализа и синтеза таких схем используют язык булевой алгебры. Этот уровень описания допустим при числе элементов в пределах 200.
3) Уровень операционных схем.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.