где hN, hF, hгц – плечи соответствующих сил. Берутся из кинематической привязки);
F1 – сила трения в контактной точке рычага.
Определяется из условия, что равнодействующая сил ![]() проходит
через опорную точку 3 (рисунок 2.4):
проходит
через опорную точку 3 (рисунок 2.4):
![]() .
.
Условие, что линия действия равнодействующей сил в точке 1 проходит через точку 3, является рабочей гипотезой, наиболее полно отвечающей физической сути нагружения захватных рычагов.
Силы, найденные по выше представленным формулам должны быть проверены на надежность захвата при подъеме дерева с земли. При этом в проекции на вертикаль должно выполняться следующее условие равновесия:
 .
.
Отсюда
 .
.
Дерево не должно отрываться от контактной точки 3, то есть реакция N3 должна быть больше нуля:
 .
.
Отработка кинематической схемы ЗУ является одним из принципиальных элементов расчета ЗУ, поскольку из нее берутся многие недостающие данные для расчета нагруженности и прочности рычагов. В качестве базы для построения кинематической схемы выбирается сечение дерева по максимальному и минимальному диаметрам (рисунок 3.1).
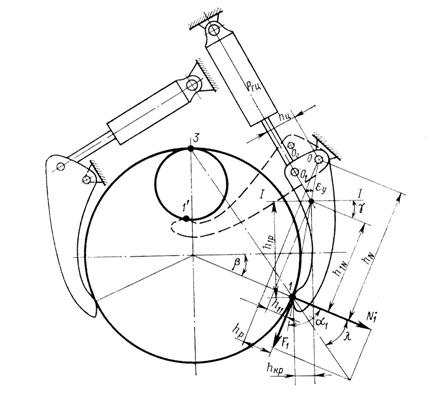
Рисунок 3.1 – Кинематически-компоновочная схема ЗУ
Из точек 1, 1' методом засечек отыскиваем
положение оси вращения рычага ЗУ, сообразуясь при этом с принятой схемой
управления. Для двухрычажного ЗУ с раздельным управлением возможны две
конкурирующие схемы: одна из которых показана на рисунке 2.1 справа, другая на
том же рисунке – слева. Правая схема ЗУ работает по принципу обжатия дерева
подачей жидкости в штоковую полость гидроцилиндра,
левая – в поршневую.
Найдя положение оси шарнира рычага и изобразив на схеме контуры самого рычага, вырезаем из бумаги трафарет этого рычага.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.