3. Произвольно** выбирается точка крепления на неподвижной части (корпусе, раме и т.д.) оборудования и раствором циркуля равным одному из крайних значений линейных размеров длины цилиндра «засекается» (определяется) вторая точка крепления на подвижной части механизма рабочего органа, находящаяся в соответствующем крайнем положении.
4. Проверяется аналогичным построением соответствие хода штока другому крайнему положению рабочего органа.
При несоответствии, построение повторяется. Ниже представлен пример подобного построения (рисунок 8).
3.1.2 Процедура кинематической привязки и выбора гидроцилиндров
Кинематическая привязка гидроцилиндров, как уже указывалось выше, производится в условиях неопределенности, однако всегда существуют ограничения, определяющие область изменения начальных параметров, в которой реализуются решения. Поэтому «привязку» следует начинать определением «условий существования». Ниже приведены примеры определения таких условий для механизмов наиболее часто встречающихся на практике.
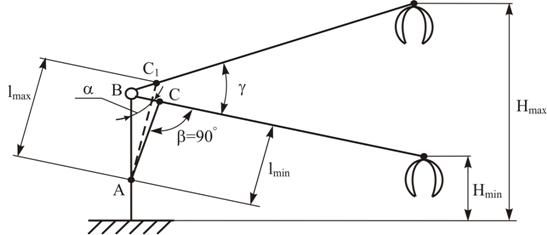
Рисунок 9* – Кинематическая привязка гидроцилиндра: А, В, С, С1 – точки крепления гидроцилиндра; lmin – минимальный размер гидроцилиндра; lmax – максимальный размер гидроцилиндра; Hmin – минимальная высота подъема рабочего органа; Hmax – максимальная высота подъема рабочего органа
На рисунке 9, если точка А – произвольно выбранная точка крепления гидроцилиндра, то
 , т. е.
, т. е. ![]() ;
;  ;
;
или точка крепления должна находиться на отрезке АВ. Это первое условие существования решения.
В общем случае, когда ![]() ;
угол
;
угол ![]() .
.
Далее, перенесем точку С на верхнее положение рабочего
органа в точку С1, сделав засечку раствором циркуля равным Rц = ВС. ВС = ВС1; тогда отрезок ![]() - это второе условие существования
решения.
- это второе условие существования
решения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.