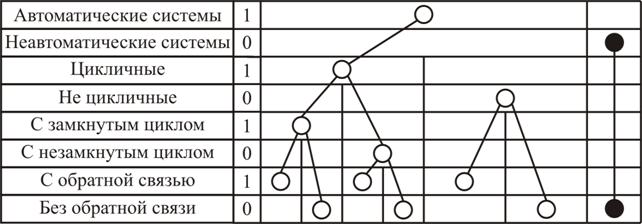
Рисунок 14 – Классификация систем управления
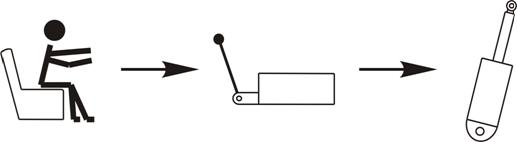
Системы управления гидрофицированных машин относятся к комбинированным системам. Функционально структуры систем представлены на рисунке 15.
 |
Рисунок 15 – Функциональная схема системы управления ОГП
Элементы преобразования сигнала в команду и передающие системы (каналы связи) составляют подсистему управления ОГП, одновременно являясь подсистемой общей системы управления.
4.1.1 Подсистема управления ОГП. Общие положения
В системе ОГП рассматриваемая подсистема выполняет функции управления технологическим оборудованием. Внешними связями для подсистемы являются сигналы оператора (оператор↔подсистема) и выдача команды на исполнительный орган. Кроме того, подсистема выполняет ряд функций по внутренним связям. Эти связи обеспечивают:
- устранение опасных и аварийных ситуаций;
- минимальное энергопотребление;
- снижение психологической и физической нагрузки на оператора.
4.1.2. Внешние связи
Подсистема управления ↔ технологическое оборудование.
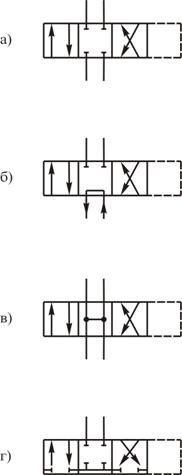
Связь (команда) прямого воздействия осуществляется золотниковыми распределителями (см. рисунок 16). Информация о выполняемых распределителем функциях расположена в квадратах условного обозначения и соответствует положению рычага (золотника).
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.