5. То
есть ![]()
![]()
![]() ,
или, что то же самое,
,
или, что то же самое, ![]()
![]()
![]() (*)
(*)
любой
оптимальный вектор задачи B является
оптимальным и в задаче A. Но для каждого оптимального
вектора в задаче A ресурсное
ограничение выполнено на равенство, значит ![]() =min
=min![]() .
.
6. Так
как ![]()
![]()
![]()
![]() выполнено
выполнено![]()
![]()
![]() (пункт 2.) и min
(пункт 2.) и min![]() =L=
=L=![]()
![]()
![]()
![]()
![]() , а значит
, а значит ![]()
![]()
![]() (**)
(**)
Из выражений
(*) и (**) следует, что ![]() =
=![]() Что
и требовалось доказать!!!
Что
и требовалось доказать!!!
Вторая теорема взаимности:
Пусть ![]() двойственная переменная (множитель
Лагранжа) для ограничения
двойственная переменная (множитель
Лагранжа) для ограничения ![]() задачи
A, а
задачи
A, а ![]() двойственная переменная
для ограничения
двойственная переменная
для ограничения ![]() в задаче B.
Тогда
в задаче B.
Тогда ![]() и
и ![]() обратно
пропорциональны, а все остальные двойственные переменные взаимных задач
пропорциональны с коэффициентом пропорциональности
обратно
пропорциональны, а все остальные двойственные переменные взаимных задач
пропорциональны с коэффициентом пропорциональности ![]() (или
(или ![]() ) .
) .
Как доказывается эта теорема я не знаю :(( Зато можно посмотреть логически:
 – показывает, на сколько изменится целевая
функция, при изменении затрат на единицу.
– показывает, на сколько изменится целевая
функция, при изменении затрат на единицу.
 – показывает, на сколько изменятся затраты
при изменении требуемого уровня целевой функции на единицу.
– показывает, на сколько изменятся затраты
при изменении требуемого уровня целевой функции на единицу.
То есть, даже из содержательной интерпретации двойственных переменных можно сделать вывод, что это обратные показатели.
Модели частичного равновесия
Модель поведения потребителя
В общем виде задача потребителя записывается следующем образом
|

Основные ы потребительских предпочтений:
1. Аксиома сравнимости: между любыми двумя векторами возможно одно из следующих предпочтений:
![]() ,
, ![]() или
или ![]()
2. Аксиома
транзитивности: если ![]() и
и ![]() , то
, то ![]()
3. Аксиома
непрерывности: если ![]() и
и ![]() , то
, то ![]() , такое
что
, такое
что ![]() (да, это не та аксиома непрерывности, что
нам давали в ТИГРОРе, но времена меняются…)
(да, это не та аксиома непрерывности, что
нам давали в ТИГРОРе, но времена меняются…)
4. Аксиома
ненасыщенности (монотонности): если ![]() , то
либо
, то
либо ![]() , либо
, либо ![]() , причём
если
, причём
если ![]() и
и ![]() , то
, то ![]() . По сути, эта аксиома означает, что оба
блага полезны для потребителя, поэтому он предпочтёт набор с большим
количеством какого-либо блага, при одинаковом количестве остальных благ.
. По сути, эта аксиома означает, что оба
блага полезны для потребителя, поэтому он предпочтёт набор с большим
количеством какого-либо блага, при одинаковом количестве остальных благ.
5. Аксиома
строгой выпуклости: если ![]() и
и ![]() , то
, то ![]() и
и ![]()
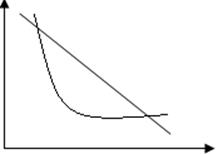
Графическая иллюстрация:
В данном курсе рассматриваются только предпочтения заданные целевой функцией, с такими предпочтениями удобней работать, и именно для них разработана теория математического моделирования. Однако не стоит забывать, что ни один индивид не может точно назвать свою целевую функцию, хотя свои предпочтения довольно однозначно, могут определить большинство индивидов.
Итак, целевая
функция ![]() . Стоит, однако, заметить, что эта
функция определяется неоднозначно, с точностью до монотонно возрастающего
преобразования
. Стоит, однако, заметить, что эта
функция определяется неоднозначно, с точностью до монотонно возрастающего
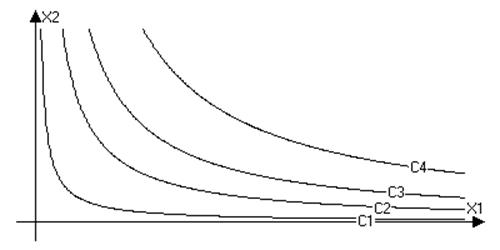
преобразования ![]() . Ряд свойств целевой функции
удобно изучать с помощью поверхностей безразличия (если X
– двухмерный вектор, то – кривых безразличия):
. Ряд свойств целевой функции
удобно изучать с помощью поверхностей безразличия (если X
– двухмерный вектор, то – кривых безразличия):
![]() , где с – меняющийся параметр,
характеризующий уровень целевой функции.
, где с – меняющийся параметр,
характеризующий уровень целевой функции.
Меняя с можно построить карту кривых безразличия. На одной кривой будут лежать наборы благ, приносящие одинаковый уровень полезности, причем, хотя определение целевой функции неоднозначно, семейство кривых безразличия единственно.
 Кривые
безразличия возрастают по всем своим аргументам (аксиома ненасыщенности), т.е.
увеличение потребления одного блага при неизменном уровне потребления всех
остальных благ увеличивает значение целевой функции. Поэтому более удаленная от
начала координат поверхность соответствует большему значению целевой функции.
Тогда наша задача сводится к нахождению допустимых точек, принадлежащие кривой
безразличия, максимально удаленной от начала координат.
Кривые
безразличия возрастают по всем своим аргументам (аксиома ненасыщенности), т.е.
увеличение потребления одного блага при неизменном уровне потребления всех
остальных благ увеличивает значение целевой функции. Поэтому более удаленная от
начала координат поверхность соответствует большему значению целевой функции.
Тогда наша задача сводится к нахождению допустимых точек, принадлежащие кривой
безразличия, максимально удаленной от начала координат.
Кроме того, стоит заметить, что поверхности безразличия не могут пересекаться, иначе получалось бы, что один и тот же набор соответствует разным уровням полезности, что в принципе невозможно.
Основные виды целевых функций
1.
![]() , где
, где ![]()
![]() – функция Кобба-Дугласа, приятной
особенностью этой функции является то, что в оптимальном плане не один
– функция Кобба-Дугласа, приятной
особенностью этой функции является то, что в оптимальном плане не один ![]() не занулится.
не занулится.
2.
![]() – функция Стоуна. Где
– функция Стоуна. Где ![]()
![]() ,
, ![]() – минимальное количество блага
– минимальное количество блага ![]() , необходимое для проживания, т.е. как бы
отграничили
, необходимое для проживания, т.е. как бы
отграничили ![]() от нуля.
от нуля.
3.
![]() – линейная функция, характеризует
взаимозаменяемые товары.
– линейная функция, характеризует
взаимозаменяемые товары.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.