

















































Теорія автоматичногокерування.
Теорія лінійних систем.
Основні поняття й термінологія теорії автоматичного керування.
Автоматизація технологічних процесів є однієї з найважливіших завдань технічного прогресу. При всьому різноманітті автоматичних пристроїв і шляхів автоматизації технологічних процесів існують загальні теоретичні положення, що служать науковим базисом і формують специфічні методи вивчення систем керування, їхнього аналізу й синтезу.
Кібернетика – наука про керування в різних сферах реального миру незалежно від фізичної природи об'єктів, що вивчає загальні принципи й закони керування.
Теорія автоматичного керування – частина кібернетики (технічна кібернетика), що вивчає питання керування в технічних системах.
Величезний внесок у розвиток теорії автоматичного керування внесли вітчизняні вчені: Ползунов, Попов, Солодовніков, Вишнєградський, Ципкин, Чумаков, Чинаєв, Суд-Злочевський, Ляпунов й ін.
Загальні поняття й визначення.
Під керуванням у технічних системах розуміється навмисний вплив на об'єкт керування, що забезпечує його необхідне функціонування.
Керування здійснюється (формується й реалізується) керуючою частиною системи. У тих випадках, коли деякі функції керування виконує оператор, система керування є автоматизованою (напівавтоматичне керування).
Якщо керування здійснюється без участі людини за допомогою технічних (керуючих) пристроїв, то система називається автоматичної (автоматичне керування).
Регулювання є частковим випадком керування. Завдання регулювання полягає в підтримці протягом тривалого інтервалу часу або зміні належним чином основних показників (координат стану) об'єкта керування.
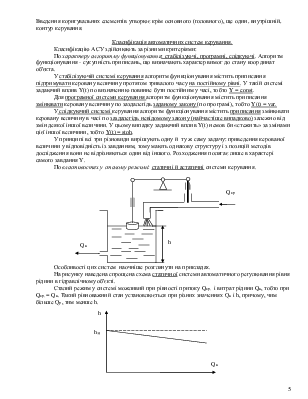
Під об'єктами керування розуміють технологічні процеси, технологічне устаткування (машини, апарати, різні агрегати), які мають потребу в наданні спеціально організованих впливів з боку керуючої частини, що забезпечують досягнення поставленої мети керування.
Сукупність об'єкта керування й керуючого пристрою утворюють систему автоматичного керування.
Розглянемо основні види впливів на
об'єкт керування
на
об'єкт керування
 |
Стан об'єкта характеризується певними фізичними величинами (координатами стану), які повинні зберігатися постійними або змінюватися заданим чином у часі. Такі величини називаються керованими (регульованими) величинами або інакше, вихідними величинами об'єкта Хвих(t). Термін «вихідна величина» зовсім не означає, що вона є мірою вихідного матеріального потоку з об'єкта, цей термін прийнятий внаслідок позначення зазначеної величини на зображеній структурній схемі.
Керуючий вплив U(t), який формується керуючим пристроєм (регулятором) в автоматичних системах керування, спрямований на компенсацію дії зовнішніх впливів fi(t) (збурень), що збурюють стан об’єкта керування. Керуючий вплив є внутрішнім впливом, оскільки виробляється усередині системи однієї з її складових.
Збурюючі впливи fi(t) по своїй суті є наслідком впливу різних факторів зовнішнього середовища, які дестабілізують стан об'єкта.
Позначений у дужках аргумент t означає, що і координата стану Хвих, і керуючий вплив U змінюються у часі.
Принципи керування.
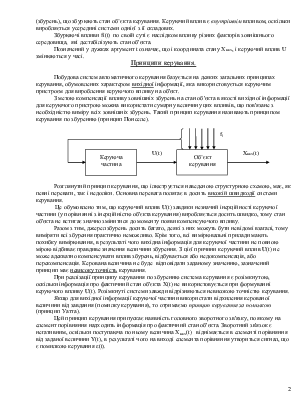
Побудова систем автоматичного керування базується на деяких загальних принципах керування, обумовлених характером вихідної інформації, яка використовується керуючим пристроєм для вироблення керуючого впливу на об'єкт.
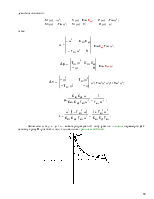
З метою компенсації впливу зовнішніх збурень на стан об'єкта в якості вихідної інформації для керуючого пристрою можна використати сумарну величину цих впливів, що пов'язане з необхідністю виміру всіх зовнішніх збурень. Такий принцип керування називають принципом керування по збуренню (принцип Понселе).
 |
Розглянутий принцип керування, що ілюструється наведеною структурною схемою, має, як певні переваги, так і недоліки. Основна перевага полягає в досить високій швидкодії системи керування.
Це обумовлено тим, що керуючий вплив U(t) завдяки незначнй інерційності керуючої частини (у порівнянні з інерційністю об'єкта керування) виробляється досить швидко, тому стан об'єкта не встигає значно змінитися до моменту появи компенсуючого впливу.
Разом з тим, джерел збурень досить багато, деякі з них можуть бути невідомі взагалі, тому виміряти всі збурення практично неможливо. Крім того, всі вимірювальні прилади мають похибку вимірювання, в результаті чого вихідна інформація для керуючої частини не повною мірою відбиває правдиве значення величини збурення. З цієї причини керуючий вплив U(t) не може адекватно компенсувати вплив збурень, відбувається або недокомпенсація, або перекомпенсація. Керована величина не буде відповідати заданому значенню, зазначений принцип має невисоку точність керування.
При реалізації принципу керування по збуренню система керування є розімкнутою, оскільки інформація про фактичний стан об'єкта Х(t) не використовується при формуванні керуючого впливу U(t). Розімкнуті системи завжди відрізняються невисокою точністю керування.
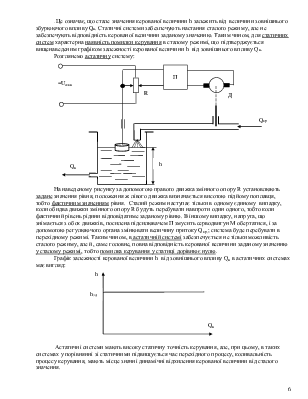
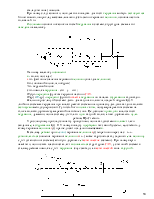
Якщо для вихідної інформації керуючої частини використати відхилення керованої величини від завдання (помилку керування), то отримаємо принцип керування за помилкою (принцип Уатта).
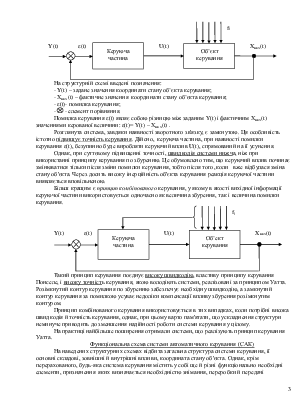
Цей принцип керування припускає наявність головного зворотного зв'язку, по якому на елемент порівняння надходить інформація про фактичний стан об'єкта. Зворотний зв'язок є негативним, оскільки поступаюча по ньому величина Хвих(t) віднімається в елементі порівняння від заданої величини Y(t), в результаті чого на виході елемента порівняння утвориться сигнал, що є помилкою керування ε(t).
 |
- Y(t) – задане значення координати стану об’єкта керування;
- Хвих(t) – фактичне значення координати стану об’єкта керування;
- ε(t)- помилка керування;
- ![]()
![]() - елемент
порівняння.
- елемент
порівняння.
Помилка керування ε(t) являє собою різницю між заданим Y(t) і фактичним Хвих(t) значеннями керованої величини: ε(t)= Y(t) – Хвих(t) .
Розглянута система, завдяки наявності зворотного зв'язку, є замкнутою. Ця особливість істотно підвищує точність керування. Дійсно, керуюча частина, при наявності помилки керування ε(t), безупинно буде виробляти керуючий вплив U(t), спрямований на її усунення.
Однак, при суттєвому підвищенні точності, швидкодія системи нижча, ніж при використанні принципу керування по збуренню. Це обумовлено тим, що керуючий вплив починає змінюватися тільки після зміни помилки керування, тобто після того, коли вже відбулася зміна стану об'єкта. Через досить високу інерційність об'єкта керування реакція керуючої частини виявляється вповільненою.
 |
Такий принцип керування поєднує високу швидкодію, властиву принципу керування Понселе, і високу точність керування, якою володіють системи, реалізовані за принципом Уатта. Розімкнутий контур керування по збуренню забезпечує необхідну швидкодію, а замкнутий контур керування за помилкою усуває недоліки компенсації впливу збурення розімкнутим контуром.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.