Найбільше повно відбивають якість керування прямі показники якості, які визначаються в основному по виду перехідної характеристики.
Прямі показники якості
До основних показників якості керування можна віднести наступні
час керування;
перерегулювання;
колебательность;
стала (статична) помилка.
При цьому слід зазначити, що в деяких випадках до якості керування можуть застосуються й інші вимоги, наприклад максимальна швидкість зміни керованої величини, основна частота коливань й ін.
Розглянемо основні показники якостей керування в системі, структурна схема якої наведена на малюнку.
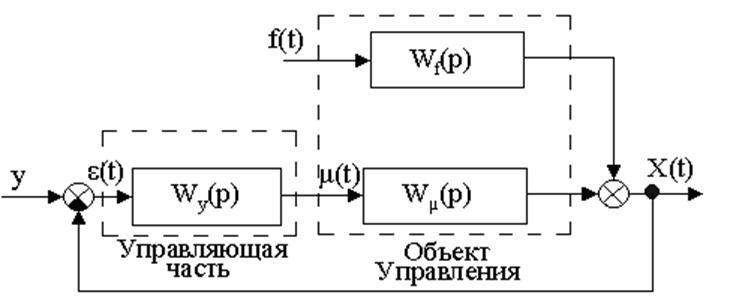 |
в - вплив, що задає;
х (t)- фактичне значення керованої величини (вихідна величина);
f(t)- зовнішній вплив, що обурює;
?(t)- керуючий вплив
![]() (t)-помилка керування,
(t)-помилка керування,
![]() ;
;
Wy(p)- передатна функція керуючої частини САУ.
Wf(p) і Wм(р) - передатні функції обьекта керування по каналах збурювання відповідно.
Реально в розглянутій системі діють два вхідних впливи: що задає й обурює f(t). У лінійних системах керування при аналізі реакції системи на одночасну дію двох вхідних впливів застосуємо метод суперпозиції. Сутність його полягає в тім, що сумарна реакція системи на кілька впливів дорівнює сума реакцій на кожне з них. Це дозволяє проводити аналіз якості керування, думаючи, що на систему діє тільки один вхідний вплив, а інші дорівнюють нулю.
режим, Що Стежить
У розглянутому прикладі спочатку припустимо, що на вхід системи впливає тільки завдання в, а збурювання f(t)=0. У цьому випадку одержуємо так званий режим, що стежить, у якому керована величина ((t) прагне досягти заданого значення в.
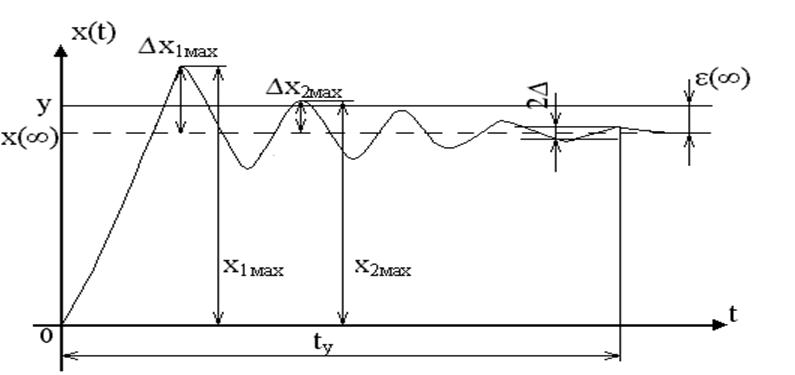 |
Визначимо по перехідній характеристиці основні показники якості керування в статичній системі, що працює в режимі, що стежить, тобто при в=соnst, f(t)=0.
Сформулюємо визначення основних показників якості керування:
1. Час керування
Часом керування ty називається інтервал часу, у плині якого починаючи з
моменту додатка впливу на систему, до моменту,
коли всі відхилення керування
величини ![]() від
її сталого значення х(
від
її сталого значення х(![]() )
стануть менше наперед заданої величини
)
стануть менше наперед заданої величини ![]()
Звичайно на
практиці приймають, що після закінчення часу керування
всі відхилення керованої величини від сталого значення не повинні
перевищувати 5% від сталого значення, тобто ![]() х(
х(![]() ). Таким чином,
якщо на графіку перехідної характеристики нанести дві
горизонтальні лінії на рівнях 1,05 х(
). Таким чином,
якщо на графіку перехідної характеристики нанести дві
горизонтальні лінії на рівнях 1,05 х(![]() ) і 0,95 х(
) і 0,95 х(![]() ), одержимо
деяку зону між цими лініями, з якої після закінчення часу керування ty не повинна виходити керована величина х(t).
), одержимо
деяку зону між цими лініями, з якої після закінчення часу керування ty не повинна виходити керована величина х(t).
У цілому цей показник якості характеризує тривалість (швидкодія) процесу керування. При настроюванні керуючої частини її параметра вибирають таким чином, щоб ty було мінімальним.
2. Перерегулювання
Перерегулюванням
називається максимальне відхилення керованої величини х1max
від сталого значення х(![]() )
виражене в %.
)
виражене в %.
Абсолютне значення максимального відхилення х1max визначається по кривої перехідної характеристики:
![]()
Відповідно, у відносних одиницях
Уважається, що при виконанні необхідних вимог відносно інших показників якості,
якість керування тим вище, чим менше ![]()
3. Колебательность.
Колебательность процеса характеризується числом коливань керованої величини х(t) щодо
сталого значення х(![]() )
за час керування ty.
)
за час керування ty.
Якщо за цей час перехідний процес робить число коливань більше заданого, то вважається, що система не має необхідну якість керування в частині її колебательности. Практично вважають припустимими 1?2 коливання, іноді 3?4.
Колебательность процеса досить повно характеризується ступенем
загасання ![]() , тобто загасанням
амплітуди коливань за один період.
, тобто загасанням
амплітуди коливань за один період.
Ступенем
загасання ![]() називається різниця між першим
називається різниця між першим ![]() другим
другим ![]() максимальними
відхиленнями керованої величини х(t) від сталого значення
х(
максимальними
відхиленнями керованої величини х(t) від сталого значення
х(![]() ), виражене в %, тобто
), виражене в %, тобто
4. Стала (статична) помилка
Під сталою
помилкою ![]() розуміють різниця
між заданому й фактично сталим значенням х(
розуміють різниця
між заданому й фактично сталим значенням х(![]() ) керованої величини
х(t).
) керованої величини
х(t).
Статистична помилка може бути визначена в абсолютних одиницях виміру (ДО, Ра, м, В, А и т. буд.). У цьому випадку
![]()
Стала помилка ![]() в абсолютних одиницях виміру для статичних систем легко визначається й аналітичним способом.
в абсолютних одиницях виміру для статичних систем легко визначається й аналітичним способом.
У розглянутому прикладі конкретної системи, що працює в режимі, що стежить, передатна функція замкнутої системи по каналі впливу, що задає, для вихідної величини х(у).
 ;
;
де W (p) = Wy (p) · Wм (р) – передаточная функция разомкнутой системы.
Зображення по Лапласу вихідної величини в динаміку
![]()
а в сталому режимі
де ДО = Ку · Км –коэффициент передачи разомкнутой системы.
Ку -коефіцієнт передачі керуючої частини.
Км -коефіцієнт передачі обьекта керування по каналі керуючого впливу.
Оригінал сталого значення керованої величини
Оригінал сталого значення помилки керування

Аналіз отриманого вираження свідчить про те, що стала помилка в абсолютних одиницях виміру залежить від величини вхідного впливу в, а отже при різних значеннях завдання, що встановилася помилка теж буде різною. Тому такий показник якості керування не є об'єктивною оцінкою, оскільки характеризує не тільки власні властивості САУ, але багато в чому залежить від величини зовнішнього впливу.
Для усунення зазначеного недоліку сталу помилку виражають у відносних одиницях (в %).

У цьому випадку,
при аналітичному визначенні ![]() маємо
маємо

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.