Повертаючись до розглянутого приклада, припустимо, що досліджується вплив на стійкість САУ коефіцієнта підсилення підсилювача Ку й постійної часу об'єкта Тоб.
Характеристичний поліном розглянутої САУ має вигляд:
F(p)=ТимТобр3+(Тім+Тоб)р2+р+КуКимКоб=Тоб(Тимр3+р2)+КуКимКоб+р+Тимр2.
У цьому виразі можна прийняти позначення:
μ=Тоб; М(р) =Тимр3+р2;
ν=Ку; N(р) =КимКоб;
Z(р) =р+Тимр2,
де μ і ν - параметри, вплив яких на стійкість САУ досліджується;
М(р) і N(p) - поліноми, що є співмножниками μ і ν відповідно;
Z(р) - поліном, що не містить ні μ, ні ν.
Здійснивши заміну р=jω, одержимо:
F(jω)= μ M(jω)+ ν N(jω)+Z(jω)=U(ω) +j(ω),
F (jω) є комплексним багаточленом, у дійсну U(ω) і уявну частину V(ω) якого лінійно входять параметри μ і ν.
У загальному вигляді дійсна й уявна частини можуть бути записані в такий спосіб:
U(ω)=μM1(ω)+νN1(ω)+Z1(ω);
V(ω)=μM2(ω)+νN2(ω)+Z2(ω);
Коливальній границі стійкості відповідає проходження годографа Михайлова через початок координат комплексної площини, тобто рівність нулю дійсної й уявної частин комплексного характеристичного полінома. Отже:
μM1(ω)+νN1(ω)+Z1(ω)=0;
μM2(ω)+νN2(ω)+Z2(ω)=0;
Визначення параметрів μ і ν здійснюють шляхом рішення системи рівнянь:
μ =  ; ν =
; ν = ![]() ,
,
де
 ;
;
 ;
;
 .
.
У нашому прикладі, після підстановки р =jω, характеристичної поліном, з урахуванням того, що Тоб=μ, а Ку=ν здобуває вид:
F(jω)=μ(-jТимω3–ω2) +νКимКоб+(jω-тімω2) =μ(-ω2) +νКимКоб–Тимω2+j(μ(Тімω2)+ω);
U(ω)=μ∙ (-ω2) +ν∙ КимКоб–Тимω2=0;
V(ω)=μ∙ ω(-Тімω2) +ν∙ 0+ω=0,
де можна позначити:
M1(ω) = -ω2; N1(ω) = Кім Коб; Z1(ω) = -Тім ω2;
M2 (ω) = -Тім ω3; N2 (ω) = 0; Z2 (ω) = ω;
отже:
 = Кім Коб
Тім ω3;
= Кім Коб
Тім ω3;
 = Кім Коб
ω;
= Кім Коб
ω;
 =ω3+Тім2ω5=ω3(1+Тім2
ω2);
=ω3+Тім2ω5=ω3(1+Тім2
ω2);
μ= =
= ;
;![]()
ν =  =
=  ;
;![]()
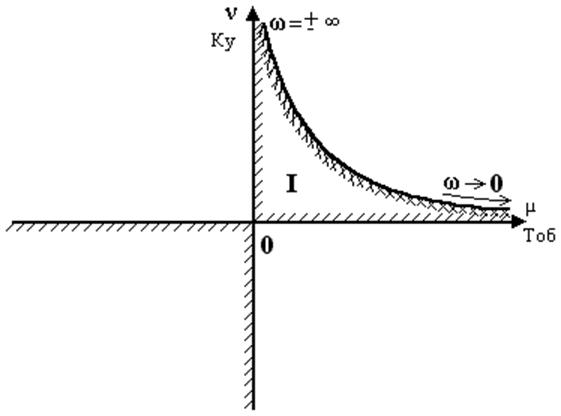 |
Основна крива доповнюється двома особливими прямими, рівняння яких виходять у результаті дорівнюючи до нуля коефіцієнтів при нульовій і старшій похідній характеристичного полінома,т.е:
Кім Коб · Ку= 0,
Тім Тоб = 0,
звідки:
Ку = ν = 0,
Тоб = μ = 0.
На малюнку представлена основна крива D-розбивки й дві особливі прямі співпадаючі з осями координат. Основна крива штрихується подвійним штрихуванням, оскільки обходиться двічі, будучи парною функцією ?.
Правила штрихування:
Спочатку штрихується основна крива D-розбивки, а потім особливі прямі.
Основна крива
штрихується ліворуч при збільшенні ω від -![]() до
+
до
+![]() , якщо
, якщо ![]() >
0; а праворуч, якщо
>
0; а праворуч, якщо ![]() <
0. Оскільки при ω = 0 визначник
<
0. Оскільки при ω = 0 визначник ![]() міняє свій знак на протилежний, те основна крива
обходиться двічі, отже двічі заштриховується;
міняє свій знак на протилежний, те основна крива
обходиться двічі, отже двічі заштриховується;
Особливі прямі до крапки перетинання з основної кривої штрихуються одиночним штрихуванням таким чином, щоб їхні штрихування й штрихування основній кривій були спрямовані друг до друга або в різні сторони.
У розглянутому прикладі крива D-розбивки дозволяє відразу визначити область стійкості. Область, обмежена заштрихованими усередину лініями (область I) є областю стійкості, і це твердження не вимагає додаткової перевірки. Визначення зазначеної області здійснювалося, виходячи з первісного положення про те, що основна крива D-розбивки є границею коливальної стійкості й саме тому, відповідно до критерію стійкості Михайлова, речовинна й мнима частини характеристичного полінома прирівнювалися до нуля.
D-розбивка по двох конструктивних параметрах можна здійснити, використовуючи які-небудь інші критерії стійкості. Розглянемо можливість застосування критерію Гурвица.
У характеристичному рівнянні розглянутої як приклад системи
ТимТобр3+(Тім+Тоб)р2+р+КобКимКу=0
варьируемыми параметрами є ![]() =Тоб;
=Тоб; ![]() =Ку, інші параметри фіксовані.
=Ку, інші параметри фіксовані.
Система 3-го порядку, відповідно до критерію Вышнеградского, перебуває на границі стійкості при рівності добутків середніх і крайніх коефіцієнтів характеристичного рівняння, тобто:
(Тім+Тоб)1=КобКимКуТимТоб ,
звідки:
Ку= =
=
 |
Рівняння особливих прямих, як і вказувалося вище, перебувають із умови рівності нулю коефіцієнтів при старшій і нульовій похідній характеристичного рівняння. У цьому випадку, рівняння особливих прямих перебувають із умов:
ТимТоб=0;
КуКимКоб=0,
звідки:
Тоб = μ = 0,
Ку = ν = 0.
Ці прямі збігаються з віссю ординат і віссю абсцис відповідно.
Для системи 3-го порядку такий підхід набагато простіше, ніж розглянутий вище, але при цьому виникають певні утруднення у виділенні області стійкості шляхом штрихування основної кривої D-розбивки й особливих прямих.
Якість керування.
Стійкість САУ характеризує можливість виконання поставленой перед системою завдання керування в принципі, але не дає відповіді на питання про якість її виконання. Стійкі САУ працездатні, але проте необхідно, щоб процес керування здійснювався при забезпеченні певних якісних показників.
У стійких САУ перехід від одного сталого стану до іншого сталого стану, залежно від значень конструктивних параметрів системи може происходств за різний інтервал часу. Характеризуватися різними динамічними й статичними (сталими) помилками, здійснюватися монотонно або з певною кількістю коливань щодо нового сталого стану.
Зазначені властивості, як і деякі інші, у цілому визначають якість процеса керування. При всьому їхньому різноманітті можна виділити трохи найбільш істотних, які з найбільшою повнотою визначають якість керування майже для всіх САУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.