Як видно з
отриманого вираження ![]() залежить
тільки від власних параметрів системи (ДО = Ку
· Км), а тому є об'єктивною оцінкою якості керування.
залежить
тільки від власних параметрів системи (ДО = Ку
· Км), а тому є об'єктивною оцінкою якості керування.
Розглянемо визначення основних показників якості в астатической системі, що працює в тім же режимі, що стежить (в = const, f(t)=0).
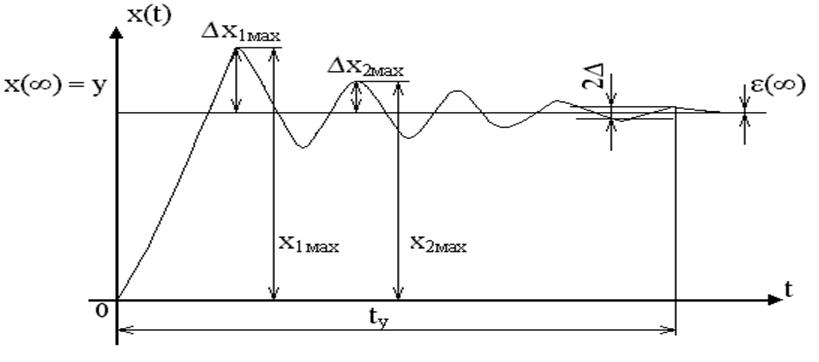 |
Час керування ty, перерегулювання ![]() , ступінь загасання
, ступінь загасання ![]() визначаються
аналогічно розглянутому вище.
визначаються
аналогічно розглянутому вище.
Стала помилка ![]() в астатических
системах відсутній, оскільки х(
в астатических
системах відсутній, оскільки х(![]() )=в, тому
)=в, тому ![]() =0 як в абсолютних, так й у відносних одиницях.
=0 як в абсолютних, так й у відносних одиницях.
Стабілізуючий режим
При визначенні основних показників якості в САУ, що працюють у стабілізуючому режимі, передбачається, що на вході системи діє зовнішнє збурювання f(t), а вплив, що задає, в = 0.
Виконуючи своє
функціональне призначення, система керування працює таким чином, щоб керована величина х (t) у
сталому стані прагнула до заданого значення в.
Але, оскільки в даному режимі в = 0, те стале
значення вихідної величини х (![]() ) також повинне
бути рівним нулю
в астатических системах або
відрізняться від нуля в статичних системах на величину
) також повинне
бути рівним нулю
в астатических системах або
відрізняться від нуля в статичних системах на величину ![]()
Розглянемо способи визначення основних показників якості по перехідній характеристиці статичної системи, що працює в стабілізуючому режимі (f(t)=const = f, в = 0).
 |
Перерегулювання можна визначити по тій же формулі
Ступінь загасання ![]()
Стала помилка в абсолютних одиницях виміру
![]()
але, оскільки в цьому режимі в = 0, те
![]()
З отриманого випливає, що значення сталої помилки в абсолютних одиницях дорівнює сталому значенню керованої величини, узятому із протилежним знаком. Знак помилки в більшості випадків не грає істотної ролі, тому як статична помилка використають модуль сталого значення керованої величини, тобто
![]()
Однак, як указувалося вище, статична помилка, виражена в абсолютних одиницях виміру, залежить не тільки від власних властивостей САУ, але й від величини зовнішнього впливу, місця його додатка.
З метою же знаходження статичної помилки, вираженої у відносних одиницях (%), скористатися формулою
не можна (в =
0). Тому, для визначення статичної помилки ![]() в
цьому випадку як засіб рішення поставленой завдання воспользуемая
результатами наступних аналітичних міркувань.
в
цьому випадку як засіб рішення поставленой завдання воспользуемая
результатами наступних аналітичних міркувань.
Передаточная функція розглянутої замкнутої системи, що працює в стабілізуючому режимі по каналі впливу, що обурює, f(t) для вихідної величини x(t).

Зображення по Лапласу вихідної величини в динаміку
![]()
у сталому режимі
де Кf – коефіцієнт передачі обьекта керування по каналі впливу, що обурює.
Оригинал сталого значення керованої величини
Оригінал статичної помилки керування, вираженої в абсрлютных одиницях
Статична помилка,
виражена у відносних одиницях (%), не повинна залежати від величини зовнішнього впливу, а також місця його додатка до системи. Тому її значення повинне бути
дорівнює значенню, певному для наступного
режиму, тобто 
З наведеного випливає, що для одержання статичної помилки у відносних одиницях, для статичних стабілізуючих систем необхідне значення статичної помилки в абсолютних одиницях розділити на добуток Кf · f, т.е.

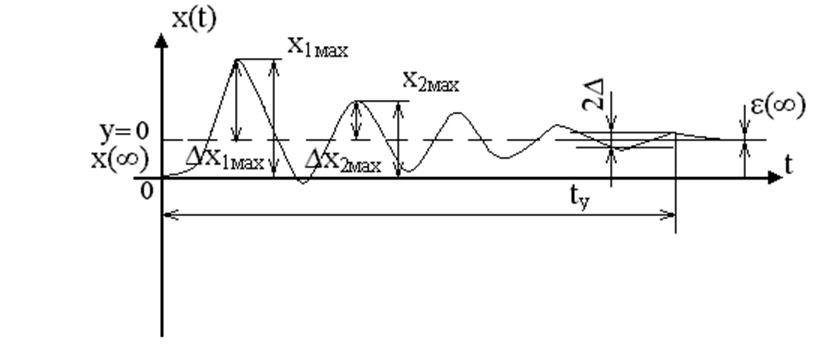
Подібні утруднення виникають при визначенні основних прямих показників якості керування й для астатических стабілізуючих систем.
Розглянемо перехідну характеристику астатической
системи, що працює в тім же стабілізуючому режимі
![]()
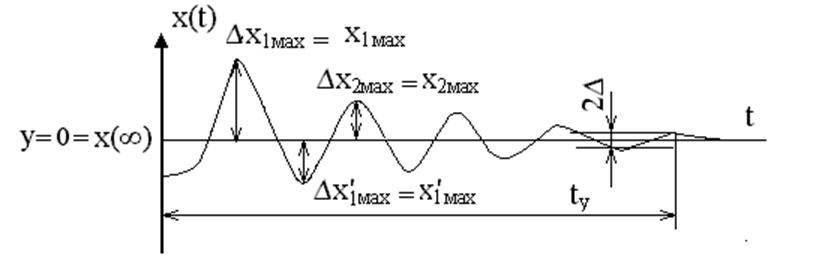 |
Визначити допускає отклонение, що, ![]() наприкінці перехідного процесу як 5%
сталого значення керованої величини х(
наприкінці перехідного процесу як 5%
сталого значення керованої величини х(![]() ) не має змісту (х(
) не має змісту (х(![]() ) в астатических
стабілізуючих системах дорівнює нулю).
) в астатических
стабілізуючих системах дорівнює нулю).
Учебники й інші літературні джерела ніяких рекомендацій
із цього питання не пропонують. Найчастіше зображуються відповідні перехідні
характеристики з нанесеними на них зонами
припустимих відхилень ![]() ,
але про спосіб визначення конкретного значення
,
але про спосіб визначення конкретного значення ![]() умовчують.
умовчують.
Аналогічна
проблема виникає при визначенні перерегулирова-ния![]() Скористатися вищенаведеною формулою
не можна в силу рівності нулю х(
Скористатися вищенаведеною формулою
не можна в силу рівності нулю х(![]() ) в астатических
стабілізуючих системах.
) в астатических
стабілізуючих системах.
Як рішення завдання по
визначенню перерегулювання ![]() в астатических
стабілізуючих системах у літературі пропонується як паллиатив формула:
в астатических
стабілізуючих системах у літературі пропонується як паллиатив формула:
де![]() - перше
максимальне негативне значення керованої величини
х (
- перше
максимальне негативне значення керованої величини
х (![]() ) .
) .
Слід зазначити, що використання цієї формули для статичних систем, що стежать, дає результати трохи відрізняються від значень, отриманих при використанні раніше наведеної формули.
Тїм не менш, нова формула для визначення ![]() дає можливість із деякою погрішністю
визначати припустиме відхилення
дає можливість із деякою погрішністю
визначати припустиме відхилення
![]() .
.
Зіставимо обидві формули для визначення ![]() в астатической
САУ, у що стежить і стабілізує режимах
в астатической
САУ, у що стежить і стабілізує режимах
.
Незважаючи на
вищенаведене зауваження у відношення розходжень одержуваних
результатам по обох формулах приблизно вони повинні бути рівні, тобто 
Підставивши відповідні значення, одержимо:
звідки:
Отримане значення можна розуміти як деяке стале квазизначение керованої величини х(t)в астатической стабілізуючій системі.
У такому випадку ![]() можна прийняти
можна прийняти
Варто сказати, що зазначені проблеми при визначенні прямих показників якості керування в астатических стабілізуючих САУ виникають лише при аналізі теоретично побудованих перехідних характеристик.
Експериментальні характеристики, побудовані в результаті проведення натурального експерименту на реально функціонуючої САУ, позбавлені особливостей показників, що утрудняють визначення, якості.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.