Национальный Технический Университет Украины
«Киевский Политехнический Институт»
Контрольная работа
по курсу «Теория автоматического управления»
тема:
«Расчет замкнутой системы III порядка»
Вариант № 4
Приняла: Выполнила:
Польшакова О. М. ст. гр. ЗИК – 71
факультета ИВТ
Казарян А. А.
«Киев – 2010»
 РАсчет Замкнутой системы III порядка
РАсчет Замкнутой системы III порядка
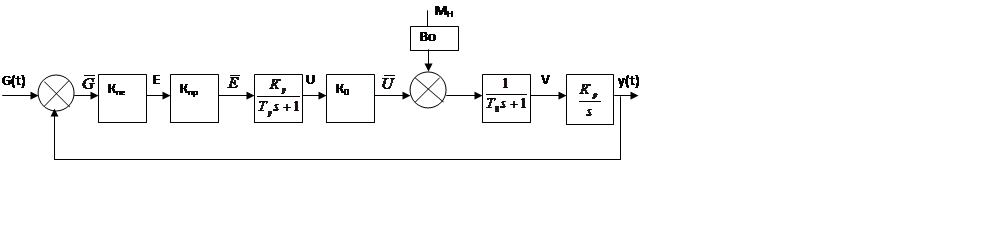
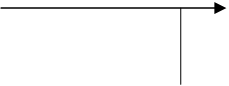
Структурная схема
Задание:
1.Составить математическую модель САУ.
2.Получить дифференциальное уравнение относительно выхода по задающему и возмущающему воздействиям.
3.Определить передаточную функцию системы.
3.1.Передаточную функцию разомкнутой системы при равенстве нулю задающего воздействия G(t)=0.
3.2. Передаточную функцию разомкнутой системы при равенстве нулю возмущающего воздействия МН(t)=0.
3.3. Передаточную функцию замкнутой системы по ошибке при действии задающего воздействия и равенстве Ø возмущающего воздействия.
3.4. Передаточную функцию замкнутой системы по ошибке при действии возмущающего воздействия и равенстве Ø задающего воздействия.
3.5. Определить закон управления.
4.Вычислить временные характеристики.
4.1.Рассмотреть САУ при равенстве Мн(t)=0, g(t)=const при нулевых начальных условиях:
y(0)=0 y'(0)=0 y"(0)=0.
4.2.С помощью обратного преобразования Лапласа найти переходную и весовую функции
5.Частотные характеристики.
5.1.АФЧХ.
5.2.АЧХ.
5.3.ФЧХ.
5.4.ЛАЧХ
6.Произвести анализ устойчивости САУ:
6.1.Критерий Вышнеградского.
6.2.Критерий Рауса-Гурвица.
6.3.Критерий Михайлова.
6.4.Критерий Найквиста.
7.Определение устойчивости по ЛАЧХ
7.1.Определение запаса устойчивости.
|
Кпе |
Кпр |
Ку |
Ко |
Кр |
Ту |
То |
Bo |
|
0,75 |
2 |
3,1 |
1 |
0,5 |
0,1 |
0,9 |
1 |
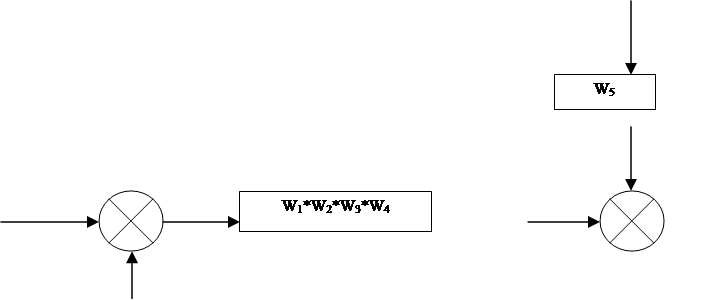
Структурная схема с передаточными функциями звеньев:
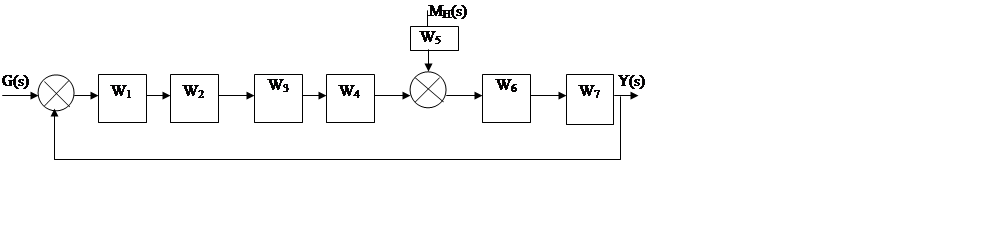
Где
W1 = Kпе ; W2 = Кпр
; W3 = ![]() ; W4 = Ko ; W5 = Bo ; W6 =
; W4 = Ko ; W5 = Bo ; W6 = ![]() ; W7 =
; W7 = ![]()
K = Кпе* Кпр*Ky* K0* Kp = 2,33
Упростим
данную схему:![]()
|

|
MH(s)
C
|
 |
|||||
![]()
1.Составить математическую модель САУ
Y(s) = B-C =(A* W1*W2*W3*W4 + MH(s)* W5)*W6*W7=(G(s)-Y(s))*W1*W2*W3*W4*W6*W7 - - MH(s)* W5*W6*W7
Тогда,
Y(s)*(1 + W1*W2*W3*W4*W6*W7) = G(s) *W1*W2*W3*W4*W6*W7 – MH(s)* W5*W6*W7
Y(s) = ![]() =
= 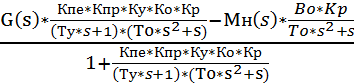 =
=
= G(s)* - MH(s)*
- MH(s)*![]()
Математическая модель САУ :
Y(s) = G(s)* - MH(s)*
- MH(s)*![]()
2.Получить дифференциальное уравнение относительно выхода по задающему и возмущающему воздействиям
Дифференциальное уравнение по задающему воздействию, где МН(t)=0 :
Y(s) = G(s)*![]()
Ty*To*s3*Y(s) + (Ty+To)*s2*Y(s) + s*Y(s) + Кпе*Кпр*Ку*Ко*Кр*Y(s) = Кпе*Кпр*Ку*Ко*Кр*G(s)
Подставим
значения и применим обратное преобразование Лапласа, где S=![]() :
:
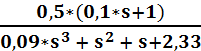
0,09*y```(t) + y``(t) + y`(t) + 2,33*y(t) = 2,33*g(t)
или
0,039*y```(t) + 0,43*y``(t) + 0,43*y`(t) + y(t) = g(t)
Дифференциальное уравнение по возмущающему воздействию, где g(t)=0 :
Y(s) = – MH(s)*![]()
Ty*To*s3*Y(s) + (Ty+To)*s2*Y(s) + s*Y(s) + Кпе*Кпр*Ку*Ко*Кр*Y(s) = –Bo*Kp*(Ty*s+1)*MH(s)
Подставим
значения и применим обратное преобразование Лапласа, где S=![]() :
:
0,09*y```(t) + y``(t) + y`(t) + 2,33*y(t) = ![]() *MH`(t) – 0,5*
*MH`(t) – 0,5*![]() * MH(t)
* MH(t)
или, разделив на 2,33 , получим:
0,039*y```(t) + 0,43*y``(t) + 0,43*y`(t) + y(t) = - 0,02* MH`(t) - 0,2* MH(t)
3.Определить передаточную функцию системы.
3.1.Передаточную функцию разомкнутой системы при равенстве нулю задающего воздействия G(t)=0
 |
MH(s)
C
![]()
|
 |
|||
![]()
Схема разомкнутой системы
Y(s) = B-C =A* W1*W2*W3*W4*W6*W7 - MH(s)* W5*W6*W7
Если канал обратной связи разомкнут, то A=G(s), тогда
Y(s) = G(s)* W1*W2*W3*W4*W6*W7 - MH(s)* W5*W6*W7 где, по условию g(t)=0,
Следовательно передаточная функция разомкнутой системы при равенстве нулю задающего воздействия :
Wp(s) = - W5*W6*W7
= ![]()
Подставив значения, получим:
Wp(s) = ![]()
3.2. Передаточную функцию разомкнутой системы при равенстве нулю возмущающего воздействия МН(t)=0
Y(s) = G(s)* W1*W2*W3*W4*W6*W7
Следовательно передаточная функция разомкнутой системы при равенстве нулю возмущающего воздействия :
Wp(s) = W1*W2*W3*W4*W6*W7
= 
Подставив значения, получим:
Wp(s) = 
3.3. Передаточную функцию замкнутой системы по ошибке при действии задающего воздействия и равенстве 0 возмущающего воздействия
![]()
![]()
![]()
![]()
![]()
![]()

|
G(s) E(s) Y(s)
![]() Y(s)
Y(s)
Схема замкнутой системы при действии задающего воздействия и равенстве 0 возмущающего воздействия
В данном случае, выходной величиной будет E(s) :
E(s) = G(s)-Y(s) = G(s)-E(s)* W1*W2*W3*W4*W6*W7
Тогда, E(s)
= ![]() * G(s)
* G(s)
Передаточная функция замкнутой системы по ошибке :
ФE(s) =
 =
= 
Подставив значения, получим:
ФE(s) =
3.4. Передаточную функцию замкнутой системы по ошибке при действии возмущающего воздействия и равенстве 0 задающего воздействия
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

|
|
MH(s)
![]()
|
 |
![]() Y(s)
Y(s)
В данном случае :
E(s) = G(s)-Y(s) = G(s) - E(s)* W1*W2*W3*W4*W6*W7 + MH(s)* W5*W6*W7 , где G(s)=0
Тогда,
E(s) = 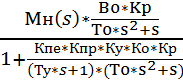 =
=  *Мн(s)
*Мн(s)
Передаточная функция замкнутой системы по ошибке :
ФE(s) =
![]()
Подставив значения, получим:
ФE(s) =
4.Вычислить временные характеристики
4.1.Рассмотреть САУ при равенстве нулю возмущающего и g(t)=const при нулевых начальных условиях y(0)=0 y'(0)=0 y"(0)=0
Математическая модель САУ :
Y(s) = G(s)*- MH(s)*![]()
Ty*To*s3*Y(s) + (Ty+To)*s2*Y(s) + s*Y(s) + Кпе*Кпр*Ку*Ко*Кр*Y(s) = Кпе*Кпр*Ку*Ко*Кр*G(s) -
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.