|
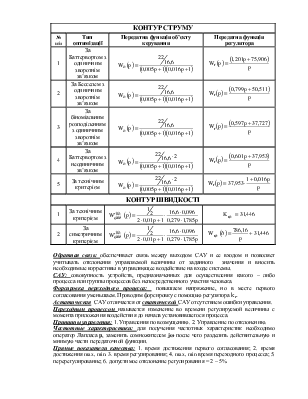
КОНТУР СТРУМУ |
|||||
|
№ п/п |
Тип оптимізації |
Передатна функція об’єкту керування |
Передатна функція регулятора |
||
|
1 |
За Баттервортом з одиничним зворотнім зв’язком |
|
|
||
|
2 |
За Бесселем з одиничним зворотнім зв’язком |
|
|
||
|
3 |
За біноміальним розподіленням з одиничним зворотнім зв’язком |
|
|
||
|
4 |
За Баттервортом з неодиничним зв’язком |
|
|
||
|
5 |
За технічним критерієм |
|
|
||
|
КОНТУР ШВИДКОСТІ |
|||||
|
1 |
За технічним критерієм |
|
|
||
|
2 |
За симетричним критерієм |
|
|
||
Обратная связь: обеспечивает связь между выходом САУ и ее входом и позволяет учитывать отклонения управляемой величины от заданного значения и вносить необходимые коррективы в управляющее воздействие на входе системы.
САУ: совокупность устройств, предназначенных для осуществления какого – либо процесса или группы процессов без непосредственного участия человека.
Форсировка переходного процесса: повышаем напряжение, но в месте первого согласования уменьшаем. Проводим форсировку с помощью регулятора kr.
Астатическая САУ отличается от статической САУ отсутствием ошибки управления.
Переходным процессом называется изменение во времени регулируемой величины с момента приложения воздействия до начала установившегося процесса.
Принципы управления: 1. Управления по возмущению. 2. Управление по отклонению.
Частотные характеристики: для получения частотных характеристик необходимо оператор Лапласа р, заменить сомножителем jω после чего разделить действительную и мнимую части передаточной функции.
Прямые показатели качества: 1. время достижения первого согласования; 2. время достижения max, min. 3. время регулирования; 4. max, min время переходного процесса; 5. перерегулирование; 6. допустимое отклонение регулирования = 2 – 5%.
Косвенные критерии качества: 1. колебательный показатель; 2. резонансная частота; 3. полоса пропускания системы; 4. частота среза.
ξ – относительный коэффициент затухания.
Коэффициент передачи в статике: необходимо оператор Лапласа р приравниваем к 0 и оставшееся численное выражение и будет соответствовать коэффициенту передачи в статике.
τ0 – постоянная времени интегрирования.
 _____________________________________________________________________________
_____________________________________________________________________________
Синтезом автоматичної системи називається вибір структурної схеми та значень параметрів окремих ланок, що забезпечують стійкість, запас стійкості, задану точність в перехідному та усталеному процесах, задані показники якості перехідного процесу.
Пропорційний
(П) реалізується послідовним вмиканням в
основне коло автоматичної системи (АС) безінерційної ланки із передаточною
функцією: 
Переваги П – регулятора: простота та швидкодія, недоліки: недостатня точність в усталеному режимі.
Пропорційно
– інтегрувальний (ПІ) реалізується послідовним
вмиканням в основне коло АС паралельно – з’єднаних безінерційної та
інтегрувальної ланок із передаточною функцією: 
Переваги ПІ – регулятора: висока точність в усталеному режимі й досить добрі показники якості в перехідному процесі.
Пропорційно – інтегрувально – диференціюючий (ПІД) послідовним вмиканням в основне коло АС паралельно – з’єднаних безінерційної, інтегрувальної та диференціюючої ланок із передаточною функцією:

Переваги ПІД – регулятора включають переваги перелічених вище простіших регуляторів й одночасно він не має їхніх недоліків.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.