По аналогії для просторової системи в загальному випадку навантаження внутрішня робота:
Ця формула дозволяє визначити роботу внутрішніх сил (сил пружності). Тут:
![]() –
елементарна довжина ділянки стержня;
–
елементарна довжина ділянки стержня;
![]() –
довжина ділянки, де визначається робота сил пружності від дії даного силового
фактора.
–
довжина ділянки, де визначається робота сил пружності від дії даного силового
фактора.
Лекція №7
Застосування принципу можливих переміщень до пружних систем.
План лекції.
1. Принцип початку можливих переміщень.
2. Теорема про взаємність робіт (теорема Бетті).
3. Теорема про взаємність переміщень (теорема Максвела).
4. Загальний метод визначення переміщень (метод Мора).
5. Правила розв'язку задач по методу Мора.
Література : [1] - ст. 361 - 370, [2] - ст. 400 - 422.
Принцип можливих переміщень є загальним принципом визначення переміщень в механічних пружних системах.
Стосовно до пружних систем даний принцип можна сформулювати так: якщо пружна система знаходиться в рівновазі, то сума можливих (віртуальних) робіт зовнішніх і внутрішніх сил на можливих нескінченно малих переміщеннях точок системи дорівнює нулю.
Можливим(віртуальним) переміщенням називається любе нескінченно мале пружне переміщення точок системи, що не приводить до порушення зв'язків.
 а)
а) ![]() – можлива робота сил
– можлива робота сил ![]() стану
стану ![]() на переміщення стану
на переміщення стану![]() ;
;
б) ![]() – можлива робота сил
– можлива робота сил ![]() стану
стану ![]() на переміщення стану
на переміщення стану![]() . Відтак сумарна можлива
робота всіх зовнішніх сил буде дорівнювати:
. Відтак сумарна можлива
робота всіх зовнішніх сил буде дорівнювати:
 , а сумарна можлива робота всіх
внутрішніх сил буде дорівнювати:
, а сумарна можлива робота всіх
внутрішніх сил буде дорівнювати:
 .
.
Оскільки система знаходиться в рівновазі то:

Розглянемо дійсні переміщення як можливі переміщення точок пружної системи:

Розділивши всі доданки на 2 будемо мати:

Таким чином ми показали, що робота зовнішніх сил дорівнює по величині роботі внутрішніх сил і протилежна їй по знаку.
![]()
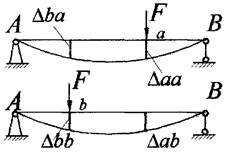
Теорема про взаємність робіт (Теорема Бетті)
Робота сил пертого стану на переміщеннях, обумовлених силами другого стану, дорівнює роботі сил другого стану на переміщеннях, що визвані дією сил першого стану.
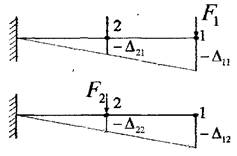 Розглянемо
довільну пружну систему, що навантажена в першому випадку узагальненим
навантаженням
Розглянемо
довільну пружну систему, що навантажена в першому випадку узагальненим
навантаженням![]() , яке прикладене в т.1. В
другому випадку навантажену узагальненою силою
, яке прикладене в т.1. В
другому випадку навантажену узагальненою силою![]() ,
що прикладена в т.2.
,
що прикладена в т.2.
![]() –
дійсне
переміщення або власне переміщення для сили (
–
дійсне
переміщення або власне переміщення для сили (![]() ).
).
![]() –
можливе
переміщення для сили (
–
можливе
переміщення для сили (![]() ).
).
![]() -
можливе
переміщення для сили (
-
можливе
переміщення для сили (![]() ).
).
![]() –
дійсне
переміщення для сили (
–
дійсне
переміщення для сили (![]() ).
).
Запишемо вираз для можливих робіт зовнішніх і внутрішніх сил обох станів системи:
І-ий стан

|
Можлива робота зовнішніх сил першого стану на переміщеннях, що викликані дією сил другого стану |
Можлива робота за рахунок внутрішніх сил відповідно |
Аналогічно для другого стану:

Оскільки праві частини І-го і ІІ-го стану рівні, то ми можемо записати:
![]()
Це закономірність отримала назву теореми про взаємність робіт (теорема Бетті)
Теорема про взаємність переміщень (теорема Максвела).
Питоме переміщення точок системи прикладення сил першого стану під дією одиничних сил другого стану дорівнює питомому переміщенню точок системи прикладення сил другого стану під дією одиничних сил першого стану.
Переміщення, що викликане
одиничною силою, називається питомим і позначається буквою![]() .
.
![]() Тільки-но ми
отримали, що:
Тільки-но ми
отримали, що:![]() . Так як
. Так як![]() , то можна записати:
, то можна записати:
![]() (*)
(*)
Вираз (*) і носить назву теореми про взаємність переміщень (теорема Максвела).
Приклад.
![]() Використовуючи
теорему про взаємність робіт, визначимо прогин (
Використовуючи
теорему про взаємність робіт, визначимо прогин (![]() )
балки посередині прольоту при дії на неї зосередженого моменту
)
балки посередині прольоту при дії на неї зосередженого моменту![]() , що прикладений на опорі
в т.А. Використовуючи ДР пружної лінії для двохопорної балки, що навантажена посередині
прольоту зосередженою силою, визначимо кутове переміщення при
, що прикладений на опорі
в т.А. Використовуючи ДР пружної лінії для двохопорної балки, що навантажена посередині
прольоту зосередженою силою, визначимо кутове переміщення при![]() .
.
 .
.
Тоді відповідно до теореми про взаємність робіт можемо записати:

Загальний метод визначення переміщень.
Метод (інтеграл) Мора
Метод Мора – це універсальний, який застосовується для любої пружної системи. При вирішенні задач по визначенню переміщень Мор запропонував на рівні з основною силовою системою використовувати допоміжну систему, що навантажена лише одним силовим фактором, що прикладається в перерізі, який нас цікавить.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.