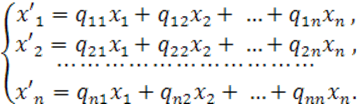
Запишем обратные формулы, выражающие новые координаты через старые. Чтобы это сделать достаточно в формулах (9) поменять ролями старые и новые координаты, одновременно транспонируя таблицы («) и (6). В результате получим:
 (11 a)
(11 a)
 (11 b)
(11 b)
Замечание:
Выясним, каким условиям
удовлетворяют коэффициенты ![]() в формулах (9).
в формулах (9).
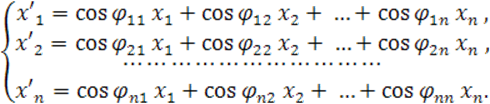
Так
как новые базисные векторы ![]() являются единичными, поэтому из формул (11а)
имеем:
являются единичными, поэтому из формул (11а)
имеем:
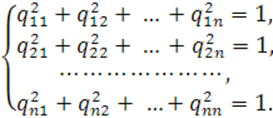 (12)
(12)
Векторы
![]() попарно перпендикулярны друг к другу, поэтому
их попарно взятые скалярные произведения равны нулю:
попарно перпендикулярны друг к другу, поэтому
их попарно взятые скалярные произведения равны нулю:
![]()
![]() (13)
(13)
Тогда имеем

а это означает, что матрица ![]() ортогональная.
ортогональная.
Пусть ![]() ортогональная матрица порядка
ортогональная матрица порядка ![]() (то есть
(то есть ![]() ). Запишем равенство (9) в матричном виде:
). Запишем равенство (9) в матричном виде:
![]()
Непосредственным подсчетом найдем результат преобразования в матричном виде:
![]() ,
,
![]()
![]() , где
, где
![]()
![]() (14)
(14)
![]()
Введем
матрицы ![]() ,
, ![]() ,
, ![]()
Матрица ![]() получена добавление к матрице
получена добавление к матрице ![]() строки и столбца, а матрица
строки и столбца, а матрица ![]() – матрица преобразования (выражающая
старые координаты через новые).
– матрица преобразования (выражающая
старые координаты через новые).
В силу (14) имеем

![]()
Теорема
2. Определители матриц ![]() и
и ![]() и их ранги, являются инвариантами
относительно поворота системы координат, т. е.
и их ранги, являются инвариантами
относительно поворота системы координат, т. е.
![]()
Доказательство:
т.к. ![]() , то
, то
![]()
Так
как при умножении на невырожденную матрицу ранг матрицы не изменяется, то
получим ![]() . т.к.
. т.к. ![]() , то
, то
![]()
Так
как при умножении на невырожденную матрицу ранг матрицы не изменяется, то
получим ![]() .
.
Теорема доказана.
1.3. Канонический вид уравнения квадрики
Пусть квадрика в некоторой декартовой системе координат задана уравнением (1). Упростим это уравнение путем надлежащего выбора новой декартовой системы координат.
Уравнение преобразования системы координат в матричном виде:
![]() , (15)
, (15)
где ![]() координатные столбцы текущей точки в
старых и новых координатах,
координатные столбцы текущей точки в
старых и новых координатах, ![]() – ортогональная матрица порядка
– ортогональная матрица порядка ![]() ,
, ![]() – столбец высоты
– столбец высоты ![]() .
.
Данное уравнение задает
поворот и перенос системы координат. При ![]() преобразование координат называется переносом,
преобразование координат называется переносом, ![]() – поворотом.
– поворотом.
Непосредственным подсчетом найдем результат преобразования в матричном виде:
![]() ,
,
![]()
![]()
![]()
![]()
![]() , где
, где
![]()
![]() (16)
(16)
![]()
Известно, что путем определенного выбора преобразования координат уравнение (1) можно привести к каноническому виду:
![]() , где
, где ![]() . ([14])
. ([14])
1.4. Основные инварианты
Определение 1: Ортогональный инвариант уравнения
квадрики - это такая функция ![]() коэффициентов ее уравнения, которая не меняется при
преобразовании данной ортонормированной системы координат к другой ортонормированной
системе с базисными векторами той же длины, то есть при преобразовании
уравнения (2) по формуле (15).
коэффициентов ее уравнения, которая не меняется при
преобразовании данной ортонормированной системы координат к другой ортонормированной
системе с базисными векторами той же длины, то есть при преобразовании
уравнения (2) по формуле (15).
Инвариант уравнения квадрики может изменяться при
умножении всех коэффициентов уравнения (2) на одно и то же число ![]() , то есть, вообще говоря,
, то есть, вообще говоря, ![]() . Во многих случаях инварианты являются однородными
функциями коэффициентов уравнения квадрики. В таких случаях
. Во многих случаях инварианты являются однородными
функциями коэффициентов уравнения квадрики. В таких случаях
![]()
Число ![]() - степень однородной функции - будем называть порядком инварианта.
При
- степень однородной функции - будем называть порядком инварианта.
При ![]() инвариант уравнения квадрики будет инвариантом самой
квадрики. Такой инвариант имеет геометрический смысл.
инвариант уравнения квадрики будет инвариантом самой
квадрики. Такой инвариант имеет геометрический смысл.
Пусть ![]() - инварианты уравнения квадрики порядков
- инварианты уравнения квадрики порядков ![]() , а
, а ![]() - какие-либо числа;
- какие-либо числа; ![]() Тогда
Тогда ![]() есть тоже инвариант уравнения квадрики, а
его порядок равен
есть тоже инвариант уравнения квадрики, а
его порядок равен ![]() .
.
Далее мы рассмотрим ряд инвариантов уравнения квадрики, которые позволяют во всех случаях записать каноническое уравнение квадрики. Они образуют полную систему инвариантов уравнения квадрики.
Докажем в общем случаи (для преобразования 15)
что ![]() .
.
Так как ![]() и
и ![]() , то имеем
, то имеем
![]()
Таким образом, определитель ![]() матрицы
матрицы ![]() , составленной из коэффициентов старших членов
уравнения квадрики, есть инвариант ее уравнения. Легко видеть, что порядок
этого инварианта равен
, составленной из коэффициентов старших членов
уравнения квадрики, есть инвариант ее уравнения. Легко видеть, что порядок
этого инварианта равен ![]() .
.
Рассмотрим матрицы ![]() :
:
![]() ,
, ![]()
Введем еще одну матрицу того же порядка:
![]()
Покажем, что ![]()


![]()
Так как ![]() и
и ![]() , то
, то
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.