3.Находим координаты т. А из решения системы уравнений
где т. А=(L1)Ç(L2). Отсюда А=(1,1), а Zmin =Z(A)= 3∙1+5∙1 = 8.
Следовательно, max Z(X) = +∞, min Z(X)=8 при Х*=А=(1, 1).
Пример 9. Найти максимум и минимум функции Z=4x1-6x2+1 при ограничениях:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() . (5)
. (5)
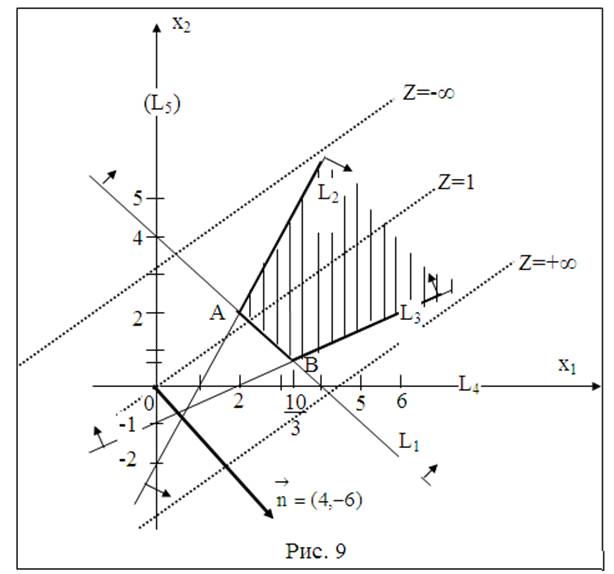
Решение.1.Строим прямые, уравнения, которых получаются в результате замены в ограничениях (1)…(5) знаков неравенств на знаки равенств (см. рис. 9).
2.Строим прямую Z = 1. Для этого строим вектор ![]() и через т. О(0, 0) проводим прямую, перпендикулярную
ему.
и через т. О(0, 0) проводим прямую, перпендикулярную
ему.
3. Перемещаем прямую в направлении противоположном вектору. Прямая Z всегда будет пересекать многоугольник решений. Следовательно, линейная функция неограниченно убывает, и конечного оптимума у нее нет, т.е. min Z = -∞.
4.Перемещаем прямую в направлении вектора. И в этом случае прямая Z всегда будет пересекать многоугольник решений. Следовательно, конечного оптимума отсутствует, т.е. mах Z = ∞.
Пример 10. Найти максимум и минимум функции Z=-2x1+2x2 при условиях:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() . (4)
. (4)
Решение.1.Строим прямую ![]() (L1), соответствующую
ограничению (1). Не трудно
заметить, что прямая проходит через точки (0,2) и (2,0) (см. рис. 10).
(L1), соответствующую
ограничению (1). Не трудно
заметить, что прямая проходит через точки (0,2) и (2,0) (см. рис. 10).
2.Строим
прямую ![]() (L2), соответствующую ограничению (2). Эта прямая проходит через точки
(0,1) и (-1,0).
(L2), соответствующую ограничению (2). Эта прямая проходит через точки
(0,1) и (-1,0).
3.Так как прямые (L1) и (L2) не проходят через точку О(0,0), подставляем координаты т. О в первое и второе ограничения.Получаем: 0≥2 и 0≥1. Это неверно, следовательно т.О не лежит в плоскости решений. Таким образом, стрелки на концах прямых (L1) и (L2) должны быть направлены в полуплоскость не содержащую т. О(0,0).
4.Строим прямую Z=0. Для этого строим вектор ![]() и через т. О(0, 0) проводим прямую, перпендикулярную
ему (см. рис. 10).
и через т. О(0, 0) проводим прямую, перпендикулярную
ему (см. рис. 10).
5.Перемещаем
прямую Z в направлении вектора ![]() .
Эта прямая встретит область решений в точке
А=(L1) Ç (L2) (прямая Z совпадает
с граничной прямой (L2) области допустимых решений и проходит через одну угловую точку этой области
А). Из рис. 10 видно, что прямая Z принимает минимальное значение в любой точке ,находящейся в области
решений, и лежит на прямой (L2), начиная с т.А и заканчивая т. В. Для нахождения общего оптимального решения
находим координаты т. А и координаты
произвольной точки, лежащей на оптимальной части прямой (L2).
.
Эта прямая встретит область решений в точке
А=(L1) Ç (L2) (прямая Z совпадает
с граничной прямой (L2) области допустимых решений и проходит через одну угловую точку этой области
А). Из рис. 10 видно, что прямая Z принимает минимальное значение в любой точке ,находящейся в области
решений, и лежит на прямой (L2), начиная с т.А и заканчивая т. В. Для нахождения общего оптимального решения
находим координаты т. А и координаты
произвольной точки, лежащей на оптимальной части прямой (L2).
6.Определяем координаты точки А=(L1) Ç (L2)
|
2х2 = 3
|
Определяем
координаты, например т.С. Полагая в уравнении ![]() (L2),
(L2),
![]() (число 1 выбрано произвольно и больше
(число 1 выбрано произвольно и больше  ), получим -1+х2=1 Þ х2=2;
), получим -1+х2=1 Þ х2=2; ![]() .
.
7.Вычисляем .
.
Согласно рис. 10 задача имеет бесконечное множество оптимальных решений
Х*
= (1-t) ![]() + t
+ t![]() , 0 ≤ t ≤ ∞,
, 0 ≤ t ≤ ∞, общая
формула для определения любого оптимального решения задачи (общее решение)
общая
формула для определения любого оптимального решения задачи (общее решение)

Придавая параметру t любые числовые значения от 0 до ∞, будем получать различные оптимальные решения задачи, при любом из которых Z = Zmin = 2.
8.Перемещаем прямую Z в направлении ее
возрастания (т.е. в направлении вектора ![]() ).
В виду того, что в этом направлении область допустимых решений не ограничена,
прямая уходит в бесконечность. Задача не имеет решения вследствие
неограниченности целевой функции, т.е. max Z(X)= + ∞.
).
В виду того, что в этом направлении область допустимых решений не ограничена,
прямая уходит в бесконечность. Задача не имеет решения вследствие
неограниченности целевой функции, т.е. max Z(X)= + ∞.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.