Указанные особенности работы приводов с компенсированным ДПТ независимого возбуждения рассмотрим при использовании схемы рис.13.2.2.
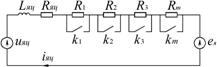
Рис.13.2.2 Схема замещения якорной цепи ДПТ
Если принять, что состояния ключей в схеме рис.13.2.2 описываются функциями k1, k2, k3, kт, принимающими значения 1 (клююч разомкнут) или 0 (ключ замкнут), то активное сопротивление в цепи якоря определяется следующим выражением
![]()
Для якорной цепи справедливо следующее уравнение
![]()
где ku – функция полярности напряжения якоря (+1 или -1).
Активное сопротивление якорной цепи обычно мало. Поэтому при номинальной частоте вращения двигателя ωн ЭДС якоря eн приблизительно равна напряжению питания uяцн (номинальному значению). При произвольной частоте вращения двигателя ω ЭДС якоря можно определить следующей формулой
![]()
Мощность и момент двигателя
Система уравнения привода рис.13.2.2 для переходных режимов работы
где J – момент инерции, Mc – момент сопротивления.
На рис.13.2.3 представлены зависимости тока и частоты вращения якоря ДПТ от времени при прямом пуске (без использования пусковых сопротивлений) при отсутствии нагрузки на валу.
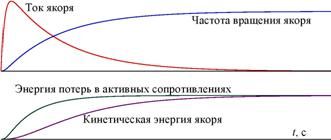
Рис.13.2.3 Ток и частота вращения якоря и энергии при прямом пуске ДПТ
На рис.13.2.3 изображены также энергия потерь в активных сопротивлениях якорной цепи и кинетическая энергия якоря, которые определены по следующим формулам

Резкое увеличение тока в начале пуска ДПТ обусловлено малой ЭДС якоря. По мере разгона якоря и увеличения его ЭДС ток якоря уменьшается.
Характерной особенностью пуска ДПТ без нагрузки на валу является то, что в конце процесса кинетическая энергия якоря оказывается равной энергии, выделившейся в активных сопротивлениях якорной цепи. При наличии нагрузки на валу энергия потерь в активных сопротивлениях увеличивается по сравнению с кинетической энергией якоря.
Применение при пуске ДПТ пусковых сопротивлений позволяет ограничить пусковой ток якоря. Диаграмма пуска при использовании трех ступеней пусковых сопротивлений представлена на рис.13.2.4.
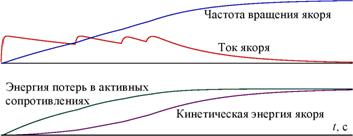
Рис.13.2.4 Ток и частота вращения якоря при пуске ДПТ с использованием пусковых сопротивлений
В соответствии с рис.13.2.4, в начале
процесса амплитуда пускового тока ограничивается суммой активных сопротивлений ![]() По истечение заданного времени
шунтируется сопротивления
По истечение заданного времени
шунтируется сопротивления ![]() и ток якоря
увеличивается. Затем через заданные интервалы времени шунтируются сопротивления
и ток якоря
увеличивается. Затем через заданные интервалы времени шунтируются сопротивления
![]() и
и ![]() На
всех ступенях, кроме последней разгон ДПТ осуществляется по реостатным
механическим характеристикам. На последней ступени разгон осуществляется по
естественной характеристике.
На
всех ступенях, кроме последней разгон ДПТ осуществляется по реостатным
механическим характеристикам. На последней ступени разгон осуществляется по
естественной характеристике.
При динамическом торможении ДПТ якорь отключается от источника питания и замыкается на активное сопротивление. Диаграмма тока и частоты вращения при динамическом торможении ДПТ из режима работы без нагрузки представлена на рис.13.2.5. В рассматриваемом случае сначала осуществляется пуск ДПТ через пусковые сопротивления. Затем осуществляется динамическое торможение с передачей энергии в те же пусковые сопротивления. В момент начала торможения напряжение питания становится равным 0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.