Характерной особенностью рассматриваемого пуска являются знакопеременные колебания момента двигателя M в начале процесса, а также соответствующие колебания других переменных величин. Возникновение этих колебаний обусловлено тем, что при подключении двигателе к трехфазной системе напряжений сети в обмотке статора возникают апериодические составляющие токов. Величины апериодических составляющих в каждой фазе зависят от момента подключения двигателя к сети. Однако, поскольку фаз несколько, всегда в каких-либо фазах апериодические составляющие токов оказываются значительными, что видно из рис.5.1.3. При этом предельное значение тока фазы может достигнуть двукратной амплитуды периодической составляющей пускового тока.
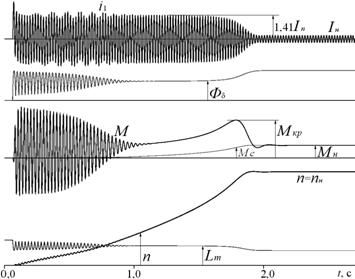
Рис.5.1.3 Диаграмма процесса пуска асинхронного двигателя, рассчитанная на математической модели
Апериодические составляющие токов фаз создают неподвижное магнитное поле. С этим полем взаимодействует вектор тока, который вращается с частотой напряжения обмотки статора. В результате этого взаимодействия в моменте двигателя возникают знакопеременные колебания. Размах этих колебаний может значительно превосходить критический момент (который обычно рассматривается как максимальный). Указанные колебания связаны с дополнительными механическими воздействиями на проводники обмоток статора и ротора, на изоляцию. Они приводят к сокращению срока службы машин, к авариям. Поэтому одной из задач, которые обычно решаются при создании электроприводов, является ограничение пусковых токов, обеспечение плавности пуска.
Другая сторона процесса пуска – нагревы элементов конструкции пусковыми токами. Энергию, которая расходуется на нагрев ориентировочно можно принять равной кинетической энергии вращающихся масс в конце процесса разгона (при отсутствии момента сопротивления на валу)
![]() .
.
Пуск двигателя без присоединенного к валу механизма обычно длится от одной до нескольких секунд. За это время обмотки статора и ротора нагреваются ориентировочно на 10-20ºС. Если к валу двигателя подключен механизм, то увеличивается время пуска и, соответственно, нагрев обмоток. Нагревы увеличиваются еще больше при наличии на валу момента сопротивления. В некоторых случаях именно нагрев конструкций двигателя является ограничением условий пуска и аргументом в пользу применения полупроводниковых преобразователей в цепях питания.
В соответствии с формулой (2.4.8) пусковой момент двигателя пропорционален активному сопротивлению обмотки ротора. Однако номинальное и критическое скольжения также пропорциональны активному сопротивлению обмотки ротора, что следует из формулы (2.4.5). Поэтому улучшение пусковых характеристик за счет простого увеличения активного сопротивления обмотки ротора приводит к снижению экономичности двигателя. В связи с этим обычно используются конструкции, в которых активные сопротивления обмотки ротора являются величинами переменными. Активные сопротивления проводников ротора большие в режимах пуска (при больших скольжениях) и малые в установившихся режимах (при малых скольжениях). Такие свойства машин реализуются в конструкциях с глубокими пазами на роторе, в конструкциях с двойной “беличьей клеткой”. Примеры конструкции пазов представлены на рис.5.2.1.

Рис.5.2.1 Типичные формы пазов ротора асинхронного двигателя
В конструкции пазов используется явление вытеснения тока при повышении частоты. В частности, при малых скольжениях частота тока в проводниках ротора ω2=sω1 мала, вытеснение токов не проявляется и токи распределяются равномерно по всему сечению паза. При этом активное сопротивление проводников ротора, которое обратно пропорционально площади поперечного сечения проводников, минимально. Асинхронная машина в этом режиме работает со сравнительно малыми потерями энергии.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.