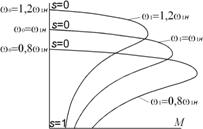
Рис.4.5.2 Механические характеристики при изменении частоты напряжения питания
Возможности увеличения частоты напряжений питания реализуются во многих частотно-регулируемых тяговых электроприводах, например, в тяговых приводах электропоездов. Однако повышенной частоте напряжений соответствуют повышенные индуктивные сопротивления цепей намагничивания, меньшие токи намагничивания и, следовательно, меньший основной магнитный поток. Как видно из рис.4.5.2, в этом случае уменьшается критический момент двигателя и в соответствии с формулой (2.4.7) снижается его перегрузочная способность.
Чаще используется регулирование асинхронного двигателя, при котором при изменении напряжения питания поддерживается постоянное отношение напряжения к частоте
![]() . (4.5.1)
. (4.5.1)
В этом случае индуктивное сопротивление цепи намагничивания изменяется пропорционально напряжению питания, ток намагничивания и основной магнитный поток постоянны. В соответствии с выражением (2.4.6) критический момент постоянен. В соответствии с (2.4.7) постоянна перегрузочная способность двигателя. Пусковой момент, как следует из выражения (2.4.8) увеличивается при уменьшении частоты и напряжения. Семейство механических характеристик асинхронного двигателя при рассматриваемом способе регулирования, представлено на рис.4.5.3.
Из параметров, влияющих на механические характеристики
асинхронного двигателя, целесообразно обратить внимание на активное
сопротивление обмотки ротора ![]() . Как следует из выражения
(2.4.6), активное сопротивление ротора не влияет на критический момент. Вместе
с тем, из (2.4.4) и (2.4.5) видно, что критическое скольжение пропорционально
. Как следует из выражения
(2.4.6), активное сопротивление ротора не влияет на критический момент. Вместе
с тем, из (2.4.4) и (2.4.5) видно, что критическое скольжение пропорционально ![]() . Из выражения (2.4.8) следует, что пусковой
момент в первом приближении также пропорционален активному сопротивлению
обмотки ротора.
. Из выражения (2.4.8) следует, что пусковой
момент в первом приближении также пропорционален активному сопротивлению
обмотки ротора.
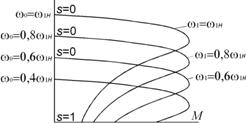
Рис.4.5.3 Механические характеристики при пропорциональном изменении частоты и напряжения питания
Семейство механических характеристик асинхронного двигателя при различных активных сопротивлениях роторных цепей представлено на рис.4.5.4.
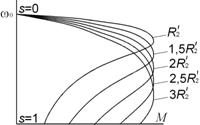
Рис.4.5.4 Механические характеристики при изменении активного сопротивления обмотки ротора
При работе асинхронной машины под нагрузкой в первом приближении скольжение пропорционально активному сопротивлению ротора, мощность потерь энергии в роторе пропорциональна скольжению.
В установившемся режиме работы трехфазного асинхронного двигателя полная мощность обмотки статора S1 определяется действующим линейным напряжением питания U1л и фазным током обмотки статора I1
![]() . (4.6.1)
. (4.6.1)
Активная мощность обмотки статора (мощность, потребляемая двигателем) зависит от коэффициента мощности cosφ
![]() . (4.6.2)
. (4.6.2)
В соответствии со схемами замещения рис.2.3.2-2.3.4, асинхронные двигатели представляют собой активно-индуктивную нагрузку, при которой токи отстают по фазе от напряжений. Типичные значения коэффициентов мощности асинхронных двигателей средней мощности 0,8-0,9 и зависят от конструктивного исполнения машин (например, при уменьшении воздушного зазора коэффициент мощности повышается).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.