В частотно-регулируемых электроприводах с синхронными двигателями используются полупроводниковые преобразователи различных типов – тиристорные и транзисторные инверторы и преобразователи частоты, активные преобразователи частоты, многотактные и многоуровневые преобразователи и т. д.
Конструкция статора синхронного двигателя (рис.9.3.1) аналогична конструкции статора двигателя асинхронного. Статор выполняется в виде магнитопровода с пазами. В пазах размещаются проводники трехфазной обмотки ОС. Токи, протекающие по трехфазной обмотке статора, создают намагничивающие силы, результирующий вектор которых образует вращающееся электромагнитное поле статора Ф1. Скорость вращения поля статора
![]()
является рабочей скоростью синхронного двигателя.
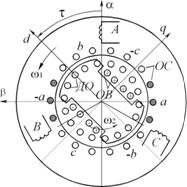
Рис.9.2.1 Конструкция синхронного двигателя
На роторе размещена обмотка возбуждения ОВ, которая через контактные кольца питается постоянным током от независимого источника постоянного напряжения uf – возбудителя.
На роторе также размещена короткозамкнутая демпферная обмотка ДО. Роль демпфера могут также играть массивные части ротора – наконечники полюсов и др.
Ток возбуждения создает электромагнитное поле Ф2,
которое неподвижно относительно ротора и в установившемся режиме вращается со
скоростью ![]() вместе с ротором. Магнитные силовые
линии поля ротора “сцепляются” с вращающимся синхронно с ним полем статора.
вместе с ротором. Магнитные силовые
линии поля ротора “сцепляются” с вращающимся синхронно с ним полем статора.
Взаимодействие полей статора и ротора создает вращающий момент M на валу синхронной машины
![]() , (9.2.1)
, (9.2.1)
где k – коэффициент.
При отсутствии нагрузки векторы поля статора и ротора
совпадают и вращаются совместно со скоростью ![]() .
При появлении на валу момента сопротивления Mc
векторы
.
При появлении на валу момента сопротивления Mc
векторы ![]() и
и ![]() расходятся
(“растягиваются” подобно пружине) на угол θ, называемый углом нагрузки.
расходятся
(“растягиваются” подобно пружине) на угол θ, называемый углом нагрузки.
На упрощенной векторной диаграмме для неявнополюсного
синхронного двигателя (Xd=Xq=X1, R1=0) рис.9.2.2 вектору ![]() соответствует ЭДС холостого хода
соответствует ЭДС холостого хода ![]() . Направление вращения указано на
диаграмме углом τ. Вектор тока
. Направление вращения указано на
диаграмме углом τ. Вектор тока ![]() создает на
индуктивностях синхронного двигателя падение напряжения
создает на
индуктивностях синхронного двигателя падение напряжения ![]() .
При этом вектор напряжения двигателя
.
При этом вектор напряжения двигателя ![]() смещается
относительно на угол θ. Вектор напряжения смещен относительно вектора тока на
угол φ. Вектор тока смещен относительно вектора ЭДС на угол ψ.
смещается
относительно на угол θ. Вектор напряжения смещен относительно вектора тока на
угол φ. Вектор тока смещен относительно вектора ЭДС на угол ψ.
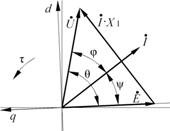
Рис.9.2.2 Векторная диаграмма неявнополюсного синхронного двигателя
Если пренебречь потерями энергии в двигателе, то активная мощность и электромагнитный момент определяются формулами
 (9.2.2)
(9.2.2)
Из векторной диаграммы
 (9.2.3)
(9.2.3)
Подставив (9.2.3) в (9.2.2), получим
![]() (9.2.4)
(9.2.4)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.