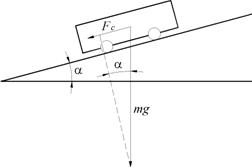
Рис.3.3.4 Силы при движении вагона по наклонной плоскости
Сопротивление движению обусловлено углом наклона плоскости α, коэффициентом сопротивления от деформаций грунтовой поверхности fгр, а также другими составляющими, которые малы и поэтому не учитываются. При массе вагона mв и ускорении свободного падения g сила сопротивления определяется выражением:
![]() . (3.3.8)
. (3.3.8)
Силы сопротивления приводятся к моментам сопротивления на валах двигателей из условия равенства мощностей при прямолинейном и вращательном движении:
 (3.3.9)
(3.3.9)
В выражениях (3.3.9) учтено, что моменты сопротивления изменяют знак при изменении направления движения, а также то, что поверхности, по которым движутся правые и левые колеса, могут иметь различные углы наклона α1 и α2.
Наиболее распространенным типом электродвигателей являются асинхронные электродвигатели с короткозамкнутым ротором или асинхронные короткозамкнутые двигатели. Они используются в нерегулируемых и регулируемых электроприводах.
В нерегулируемых электроприводах асинхронный двигатель подключается непосредственно к электросети коммутационным аппаратом, как изображено на рис.4.1.1 а), или сначала через токоограничивающий реактор l и затем непосредственно к электросети, как изображено на рис.4.1.1 б). В нерегулируемых электроприводах реверс двигателей во многих случаях осуществляется коммутационными аппаратами путем изменения порядка следования фаз, как изображено на рис.4.1.1 в).
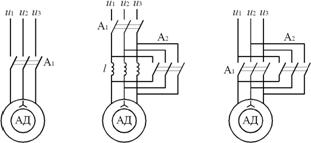
а) б) в)
Рис.4.1.1 Электроприводы с нерегулируемыми двигателями
В регулируемых электроприводах с асинхронными короткозамкнутыми двигателями используются две возможности управления – изменение амплитуды напряжений питания и изменение их частоты. Обе возможности реализуются в подавляющем большинстве случаев с помощью полупроводниковых преобразователей в цепях питания обмотки статора.
К простейшим из указанных преобразователей относятся тиристорные регуляторы напряжения. Схема электропривода с асинхронным двигателем и тиристорным регулятором напряжения изображена на рис.4.1.2 а). Основная функция преобразователя в этом приводе – ограничение пусковых токов. Возможности регулирования частоты вращения двигателя весьма ограничены.
Электроприводы с диодными выпрямителями, транзисторными инверторами напряжения и короткозамкнутыми асинхронными двигателями рис.4.1.2 б) относятся к наиболее распространенным частотно-регулируемым приводам. Эти системы обеспечивают регулирование частоты вращения двигателя практически в любом требуемом диапазоне. Недостатки – диодный выпрямитель не позволяет рекуперировать энергию в питающую электросеть при торможении двигателя и инерционной нагрузки, при большой мощности электропривода и ограниченной мощности питающей электросети возможны проблемы с качеством напряжений сети (диодный выпрямитель искажает напряжения). В частотно-регулируемых приводах с асинхронными двигателями используются также полупроводниковые преобразователи других типов.
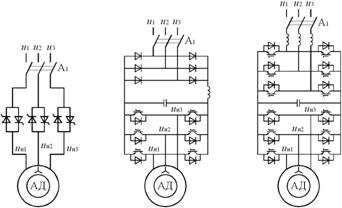
а) б) в)
Рис.4.1.2 Электроприводы с полупроводниковыми
преобразователями и асинхронными двигателями
Если к приводу предъявляются какие-либо особые требования, например по качеству потребляемой электроэнергии или по возможности рекуперации мощности в питающую сеть, то используются активные полупроводниковые преобразователи. Схема электропривода с активным транзисторным преобразователем и асинхронным двигателем представлена на рис.4.1.2 в). Активный преобразователь позволяет потреблять из сети практически синусоидальные токи, обеспечивать заданный коэффициент мощности электросети и рекуперировать мощность. В рассматриваемом случае преобразователь частоты выполняется с транзисторными мостовыми выпрямителем и инвертором напряжения. Возможно также применение активных преобразователей других типов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.